电子工程师技术服务社区
公告
登录
|
注册
首页
技术问答
厂商活动
正点原子
板卡试用
资源库
下载
文章
社区首页
文章
树莓派综合项目3:AI视觉机械臂小车(三)基本运动
分 享
扫描二维码分享
树莓派综合项目3:AI视觉机械臂小车(三)基本运动
树莓派
视觉机械臂小车
电机控制
张国平
关注
发布时间: 2021-05-20
丨
阅读: 1330
## 一、介绍 [树莓派综合项目3:AI视觉机械臂小车(一)蜂鸣器](https://www.icxbk.com/article/detail?aid=2130) [树莓派综合项目3:AI视觉机械臂小车(二)轻触按键](https://www.icxbk.com/article/detail?aid=2211) 本实验将实现履带车的基本运动,前进、后退、左转、右转。在以前的文章中有更基础细致的讲解可以参考: [树莓派基础实验34:L298N模块驱动直流电机实验](https://www.icxbk.com/article/detail?aid=1506) [树莓派综合项目2:智能小车(一)四轮驱动](https://www.icxbk.com/article/detail?aid=1555) 本实验中不同的是扩展板采用了TB6612FNG驱动芯片,电机电源接口带有反接保护电路,相对于传统的L298N在效率上提高很多,体积上也大幅减小,使用方法和L298N类似。 同时除了使用RPi.GPIO库编程以外,再使用gpiozero库的Motor类来实现电机控制。 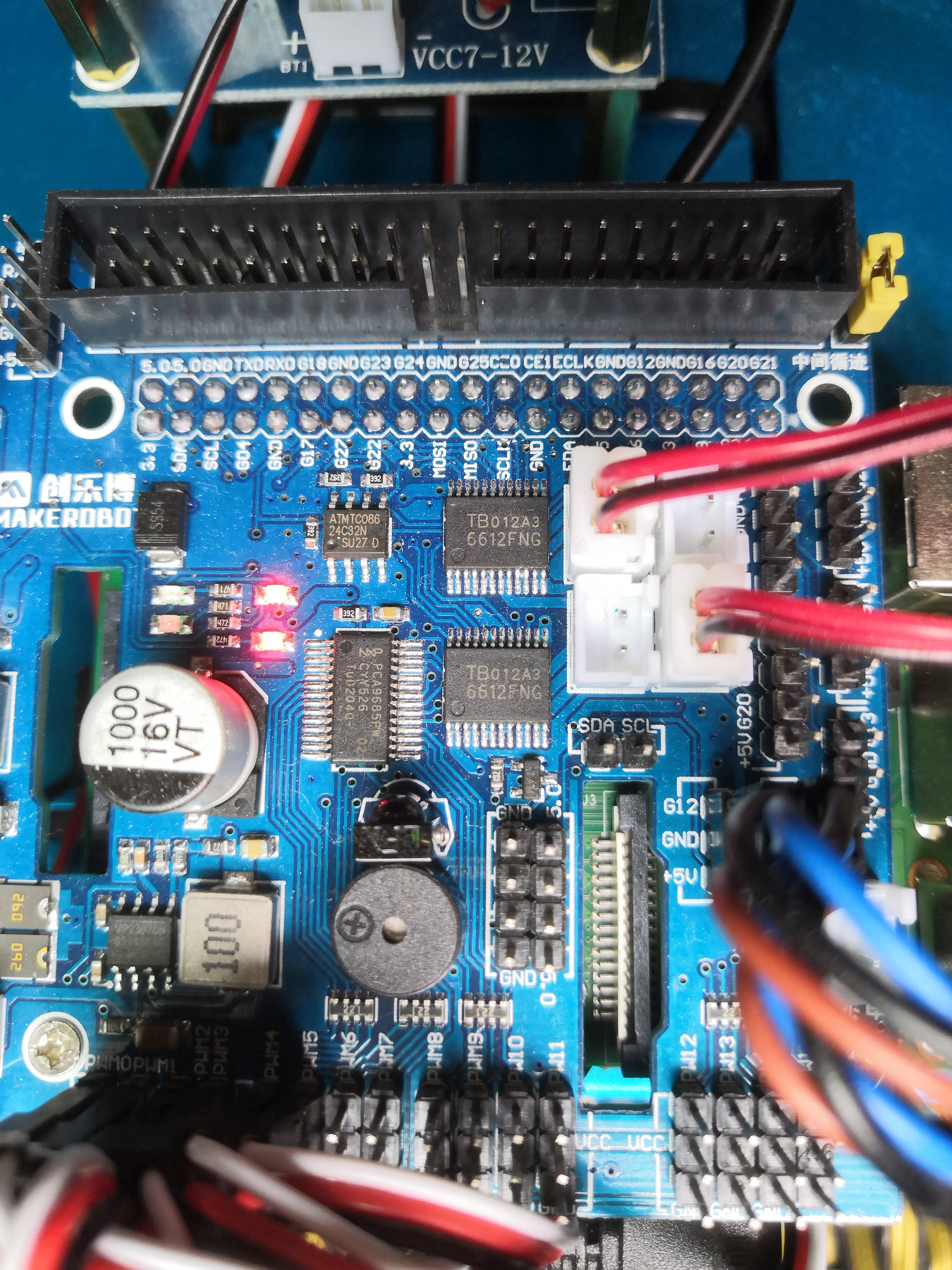 ## 二、组件  ## 三、实验原理   TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,具有大电流MOSFET-H桥结构,双通道电路输出,也就是可以驱动两个电机。   创乐博扩展板上使用了两块TB6612FNG芯片,但是并联的,只有两路输出,可以用作备份,也可以用作2路4驱。 下面分别是控制两个电机的IO口: STBY口接单片机的IO口清零电机全部停止,置1通过AIN1 AIN2,BIN1,BIN2 来控制正反转 VM 接15V以内电源 VCC 接2.7v – 5V电源 GND 接地 ##### 驱动1路: PWMA 接单片机的PWM口 |真值表:|||| |:-:|:-:|:-:|:-:| |AIN1| 0 | 0| 1| | AIN2| 0 | 1| 0| | | 停止| 正传| 反转| A01、AO2 接电机1的两个脚 ##### 驱动2路: PWMB 接单片机的PWM口 |真值表:|||| |:-:|:-:|:-:|:-:| |BIN1| 0| 0 |1| |BIN2 |0 |1| 0| ||停止| 正传| 反转| B01、BO2 接电机2的两个脚 注意: 若是pwm控制,则需要pwm频率100khz ,亲测80khz也好用,同时STBY引脚需要接高电平。 ### gpiozero的 [Motor](https://gpiozero.readthedocs.io/en/stable/api_output.html?highlight=motor#motor "Permalink to this headline")类 ```python class gpiozero.Motor(forward, backward, *, pwm=True, pin_factory=None) ``` 将H桥电机控制器连接到Pi上;将电源(例如电池组或5V引脚)连接到控制器;将控制板的输出连接到电机的两个端子上;将控制板的输入连接到两个GPIO引脚。 参数: * **forward**([*int*](https://docs.python.org/3.7/library/functions.html#int "(在Python v3.7中)")*或*[*str*](https://docs.python.org/3.7/library/stdtypes.html#str "(在Python v3.7中)"))– GPIO引脚的正向输入发动机驱动器芯片已连接。有关有效的[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering),请参见[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering)。如果这是[`None`](https://docs.python.org/3.7/library/constants.html#None "(在Python v3.7中)")一个[`GPIODeviceError`](https://gpiozero.readthedocs.io/en/stable/api_exc.html#gpiozero.GPIODeviceError "gpiozero.GPIODeviceError")将被调用。 * **backward**([*int*](https://docs.python.org/3.7/library/functions.html#int "(在Python v3.7中)")*或*[*str*](https://docs.python.org/3.7/library/stdtypes.html#str "(在Python v3.7中)"))– GPIO引脚的反向输入发动机驱动器芯片已连接。有关有效的[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering),请参见[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering)。如果这是[`None`](https://docs.python.org/3.7/library/constants.html#None "(在Python v3.7中)")一个[`GPIODeviceError`](https://gpiozero.readthedocs.io/en/stable/api_exc.html#gpiozero.GPIODeviceError "gpiozero.GPIODeviceError"))将被调用。 * **enable**([*int*](https://docs.python.org/3.7/library/functions.html#int "(在Python v3.7中)")*或*[*str*](https://docs.python.org/3.7/library/stdtypes.html#str "(在Python v3.7中)")*或*[*None*](https://docs.python.org/3.7/library/constants.html#None "(在Python v3.7中)"))–使能发动机。*一些*必需 发动机 控制板。有关有效的[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering),请参见[插针编号](https://gpiozero.readthedocs.io/en/stable/recipes.html#pin-numbering)。 * **pwm**([*bool*](https://docs.python.org/3.7/library/functions.html#bool "(在Python v3.7中)"))–如果[`True`](https://docs.python.org/3.7/library/constants.html#True "(在Python v3.7中)")(默认值),[`PWMOutputDevice`](https://gpiozero.readthedocs.io/en/stable/api_output.html?highlight=motor#gpiozero.PWMOutputDevice "gpiozero.PWMOutputDevice") 则为发动机控制器引脚,可同时控制方向和变速。如果为[`False`](https://docs.python.org/3.7/library/constants.html#False "(在Python v3.7中)"),则构造 [`DigitalOutputDevice`](https://gpiozero.readthedocs.io/en/stable/api_output.html?highlight=motor#gpiozero.DigitalOutputDevice "gpiozero.DigitalOutputDevice")实例,仅允许方向控制。 * **pin_factory**([*工厂*](https://gpiozero.readthedocs.io/en/stable/api_pins.html#gpiozero.Factory "gpiozero.Factory")*或*[*无*](https://docs.python.org/3.7/library/constants.html#None "(在Python v3.7中)"))-有关更多信息,请参见[API-引脚](https://gpiozero.readthedocs.io/en/stable/api_pins.html)(这是大多数用户可以忽略的高级功能)。 以下代码将使发动机“前进”: ```python from gpiozero import Motor motor = Motor(17, 18) motor.forward() ``` 以下代码将使发动机“50的占空比速度后退”: ```python from gpiozero import Motor motor = Motor(forward=17, backward=18,23,pwm=True) motor.backward(0.5) ``` 该类有以下几种方法: >`backward`(*speed=1*)[[source]](https://gpiozero.readthedocs.io/en/stable/_modules/gpiozero/output_devices.html#Motor.backward) 发动机向后行进 参数: **speed**(float) -电动机应转动的速度。如果在构造类时pwm为True,则可以是0(停止)和默认值1(最大速度)之间的任何值(如果不是,则只有0或1)。 >`forward`(*speed=1*)[[source]](https://gpiozero.readthedocs.io/en/stable/_modules/gpiozero/output_devices.html#Motor.forward) 发动机向前行进 参数: **speed**(float) -电机应旋转的速度。如果在构造类时pwm为True,则可以是0(停止)和默认值1(最大速度)之间的任何值(如果不是,则只有0或1)。 >`reverse`()[[source]](https://gpiozero.readthedocs.io/en/stable/_modules/gpiozero/output_devices.html#Motor.reverse) 反转电机的电流方向。如果电机目前是闲置的,这是什么也不做。否则,在当前转速下,电机的方向会反转。 >`stop`()[[source]](https://gpiozero.readthedocs.io/en/stable/_modules/gpiozero/output_devices.html#Motor.stop) 电动机停止转动 >is_active 如果电机当前正在运行,则返回True,否则返回False。 >value 表示电机的速度为-1(全速后退)和1(全速前进)之间的浮点值,0表示停止。 许多人问如何实现RPi.GPIO中的清理功能。在gpiozero中,在脚本的末尾,会自动运行清理,将GPIO引脚恢复到找到它们时的状态。 要显式关闭到一个引脚的连接,你可以手动调用一个设备对象的close()方法: ```python >>> led = LED(2) >>> led.on() >>> led <gpiozero.LED object on pin GPIO2, active_high=True, is_active=True> >>> led.close() >>> led <gpiozero.LED object closed> ``` 请注意,清除仅在正常终止脚本时进行。如果脚本由于程序错误而退出,则将不会执行清理。为了确保在引发异常后执行清理,必须处理该异常,例如: ```python from gpiozero import Button btn = Button(4) while True: try: if btn.is_pressed: print("Pressed") except KeyboardInterrupt: print("Ending program") ``` ## 四、实验步骤 **第1步:** 在上面的扩展板TB6612FNG芯片电路图上可以知道连接GPIO的接线情况,A通道为左轮控制,B通道为右轮控制: |PWMA|AIN1|AIN2|PWMB|BIN1|BIN2| |:-:|:-:|:-:|:-:|:-:|:-:| |GPIO18| GPIO22| GPIO27 |GPIO23| GPIO25| GPIO24 | **第2步:** 编写程序。这里使用While循环,interrupt( 中断 )式请参考[树莓派基础实验6:轻触开关按键实验](https://www.jianshu.com/p/0dcdfe06d1e8)。 ```python #!/usr/bin/env python2 # -*- coding: utf-8 -*- import RPi.GPIO as GPIO import time PWMA = 18 AIN1 = 22 AIN2 = 27 PWMB = 23 BIN1 = 25 BIN2 = 24 GPIO.setwarnings(False) GPIO.setmode(GPIO.BCM) GPIO.setup(AIN2,GPIO.OUT) GPIO.setup(AIN1,GPIO.OUT) GPIO.setup(PWMA,GPIO.OUT) GPIO.setup(BIN1,GPIO.OUT) GPIO.setup(BIN2,GPIO.OUT) GPIO.setup(PWMB,GPIO.OUT) L_Motor= GPIO.PWM(PWMA,80000) L_Motor.start(0) R_Motor = GPIO.PWM(PWMB,80000) R_Motor.start(0) def t_up(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,False) GPIO.output(AIN1,True) # AIN1高电平为前进 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,False) GPIO.output(BIN1,True) # BIN1高电平为前进 time.sleep(t_time) def t_stop(t_time): L_Motor.ChangeDutyCycle(0) GPIO.output(AIN2,False)#AIN2 GPIO.output(AIN1,False) #AIN1 R_Motor.ChangeDutyCycle(0) GPIO.output(BIN2,False)#BIN2 GPIO.output(BIN1,False) #BIN1 time.sleep(t_time) def t_down(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,True) # AIN2高电平为后退 GPIO.output(AIN1,False) R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,True) # BIN2高电平为后退 GPIO.output(BIN1,False) time.sleep(t_time) def t_left(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,True) # 左轮后退 GPIO.output(AIN1,False) R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,False) GPIO.output(BIN1,True) # 右轮前进 time.sleep(t_time) def t_right(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,False) GPIO.output(AIN1,True) # 左轮前进 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,True) # 右轮后退 GPIO.output(BIN1,False) time.sleep(t_time) try: while True: t_up(50,3) t_down(50,3) t_left(50,3) t_right(50,3) t_stop(3) except KeyboardInterrupt: GPIO.cleanup() ``` **第3步:**使用GPIO Zero库来重新编写程序,程序更简洁,语句更容易阅读和理解,基本不用注释就能明白语句的含义。 ```python #!/usr/bin/env python2 # -*- coding: utf-8 -*- from gpiozero import Motor import time PWMA = 18 AIN1 = 22 AIN2 = 27 PWMB = 23 BIN1 = 25 BIN2 = 24 L_Motor = Motor(forward=AIN1, backward=AIN2,enable=PWMA,pwm=True) R_Motor = Motor(forward=BIN1, backward=BIN2,enable=PWMB,pwm=True) def t_up(speed,t_time): L_Motor.forward(speed) R_Motor.forward(speed) time.sleep(t_time) def t_stop(t_time): L_Motor.stop() R_Motor.stop() time.sleep(t_time) def t_down(speed,t_time): L_Motor.backward(speed) R_Motor.backward(speed) time.sleep(t_time) def t_left(speed,t_time): L_Motor.backward(speed) R_Motor.forward(speed) time.sleep(t_time) def t_right(speed,t_time): L_Motor.forward(speed) R_Motor.backward(speed) time.sleep(t_time) try: while True: t_up(0.5,3) # 0.5即为占空比50的速度 t_down(0.5,3) t_left(0.5,3) t_right(0.5,3) t_stop(3) except KeyboardInterrupt: print("Ending program") # 在gpiozero中,在脚本的末尾,会自动运行清理,将GPIO引脚恢复到找到它们时的状态。 ```  
原创作品,未经权利人授权禁止转载。详情见
转载须知
。
举报文章
点赞
(
0
)
张国平
关注
评论
(0)
登录后可评论,请
登录
或
注册
相关文章推荐
MK-米客方德推出工业级存储卡
Beetle ESP32 C3 蓝牙数据收发
Beetle ESP32 C3 wifi联网获取实时天气信息
开箱测评Beetle ESP32-C3 (RISC-V芯片)模块
正点原子数控电源DP100测评
DP100试用评测-----开箱+初体验
Beetle ESP32 C3环境搭建
【花雕体验】16 使用Beetle ESP32 C3控制8X32位WS2812硬屏之二
X
你的打赏是对原创作者最大的认可
请选择打赏IC币的数量,一经提交无法退回 !
100IC币
500IC币
1000IC币
自定义
IC币
确定
X
提交成功 ! 谢谢您的支持
返回
我要举报该内容理由
×
广告及垃圾信息
抄袭或未经授权
其它举报理由
请输入您举报的理由(50字以内)
取消
提交






