本帖最后由 MOP 于 2016-11-2 19:08 编辑
嗨,接線沒錯唷,這是內部構造,六線4相是28BYJ-48吧:)
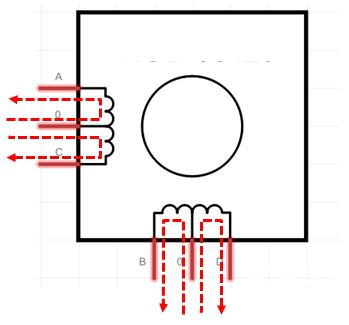
這類馬達不需要改變電流方向,為單極步進馬達(Unipolar Stepper)
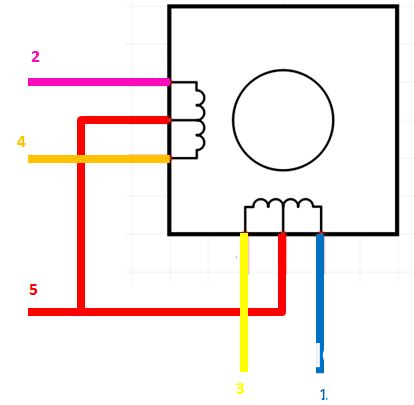
跟ULN2003接線方式A線圈的A(2),A'(4)和B線圈的B(1),B'(3),AB線圈兩者之間的COM(5)端接電源,共5線
再來是您的Code了
uchar code table[]={0x01,0x02,0x04,0x08};
uchar code table2[]={0x08,0x04,0x02,0x01};這樣沒有二相激磁唷,只有一相,table1和2只是轉動方向相反而已(順時鐘<=>逆時鐘)
給您參考1,2,1-2相三種激磁方式的序列
1. 一相激磁:1000-0100-0010-0001
2. 二相激磁:1100-0110-0011-1001
3. 一/二相激磁:1000-1100-0100-0110-0010-0011-0001-1001
因此
uchar code table2[]={0x09,0x03,0x06,0x0C};
希望對您有用:)


