PID其实是有物理意义的,比如姿态控制环里,P是角度误差输出,I是角度误差的积分量输出,D是角速度误差输出。
无人机一般都有好多个控制环,比如角速度控制环、姿态控制环。
下面讲讲姿态控制环,首先要用AHRS算法计算姿态,输入量是陀螺仪、加速度、磁力计等的参数,这样就能估计飞行器当前的角度和角速度了。
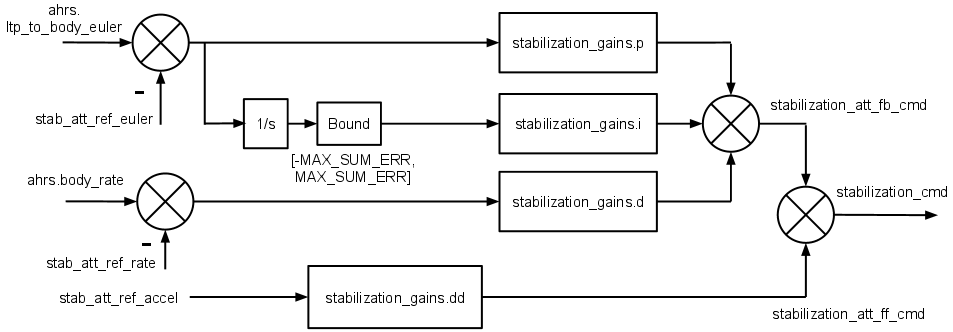
然后,如下图:
把AHRS计算得到的姿态角和角速度分别与参考的控制目标进行求差。
用姿态角误差及其积分量得到P和I
用角速度误差得到D
再把以上三个量相加得到姿态稳定的初步输出
最后把这个初步的输出与参考的角加速度参考值的输出DD相加,得到姿态控制环的总输出。
下面这个图里的姿态控制环图,实际上是一种扩展的PID算法,甚至对角速度的微分量(角加速度)也做了控制。但是在姿态环里,角加速度部分是开环。
我觉得你后面问的那个PWM周期,应该是口误,你想表达的意思是输出占空比吧。
因为,理论上,姿态计算周期、控制参数的计算周期或者PWM的输出周期完全是可以设置成不一样的,比如PPZ飞控就是可以自定义各个软件模块的执行频率。比如姿态计算周期可以在100Hz到500Hz调整,控制算法的周期可以在50Hz到100Hz调整,控制普通模拟舵机时候PWM信号是50Hz,控制数码舵机或无刷电机调速器时候PWM信号是400Hz。
把姿态稳定环的输出与占空比映射上用的是数学方法,就是映射算法。假设姿态环输出时-1到1,并且PWM信号是50Hz,那么PWM信号高电平时间是把-1到1线性映射到1000微秒到2000微秒。


