电子工程师技术服务社区
登录
|
注册
公告
全部
论坛
问答
试用
文章
评测
下载
样片
社区首页
找到
697
条结果
【7天搞定视觉SLAM】第一天——什么是SLAM?
# 一、初见slam ## 1.什么是SLAM? > SLAM (simultaneous localiza
ti
on and mapping),也称为CML (Concurrent Mapping and Localiza
ti
on), 即时定位与地图构建,或并发建图与定位。问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边移动一边逐步描绘出此环境完全的地图,所谓完全的地图(a con...
hero_chao
2020-04-16 10:50:21
浏览量:814
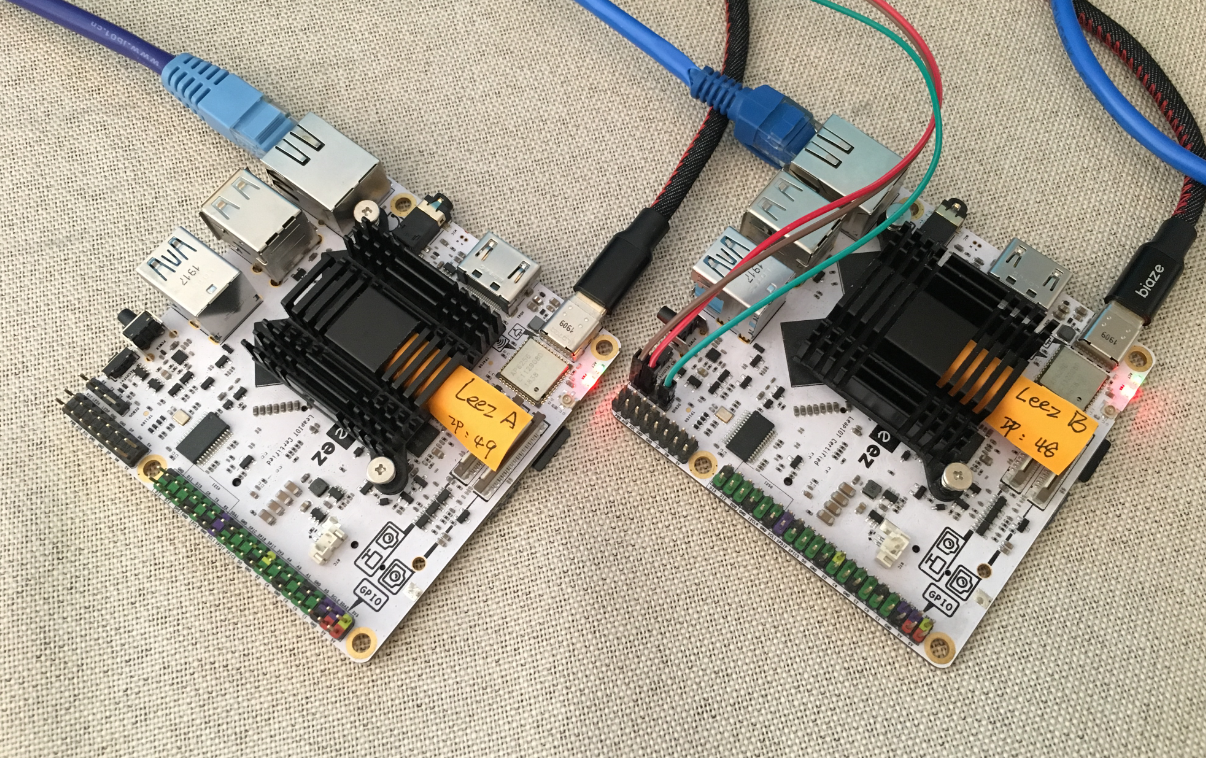
栗子派高性能集群 - 性能测试
[栗子派 MPICH 高性能集群](https://www.icxbk.com/ar
ti
cle/preview?astatus=1&aid=1299http:// "栗子派 MPICH 高性能集群")的搭建,如下连接: https://www.icxbk.com/ar
ti
cle/preview?astatus=1&aid=1299  本文测试此集群的性能。因....
robe_zhang
2020-04-16 21:13:08
浏览量:787
如何在Qt中使用容器vector
# 前言 这篇文章其实还是为读取dxf文件服务的,我可不想只是简单输出得到的数据,所以就用到了vector来存储数据。嘻嘻,蛮好玩的,记录一下!!! ## 什么是vector? 我们把vector称为容器,是因为它可以包含其他的对象。实际上,它被翻译为向量,你可以把它简单理解为不需要定义大小,可以根据需要自动扩充的数组。但是它...
大斯
2020-04-18 09:27:27
浏览量:1215
【7天搞定视觉SLAM】第二天——三维转换
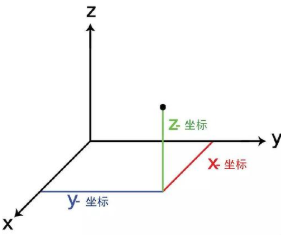
# 一、什么是三维空间? ## 1.三维空间简介 > 三维空间,日常生活中可指由长、宽、高三个维度所构成的空间,是我们看得见感受得到的空间。三维的东西能够容纳二维。三维空间的长、宽、高三条轴是说明在三维空间中的物体相对原点O的距离关系。将一些橡皮绳按经纬线的样式编成一张网,将之张平,我们可以将之近似看作是二维平...
hero_chao
2020-04-20 10:18:14
浏览量:1163
【7天搞定视觉SLAM】番外2——Eigen的使用
# Eigen ## 1.介绍 > Eigen目前最新的版本是3.4,除了C++标准库以外,不需要任何其他的依赖包。Eigen使用的CMake建立配置文件和单元测试,并自动安装。如果使用Eigen库,只需包特定模块的的头文件即可。 - 矩阵的定义:Eigen中关于矩阵类的模板函数中,共有六个模板参数,常用的只有前三个。其前三个参数分别表示矩......
hero_chao
2020-04-22 11:58:24
浏览量:569
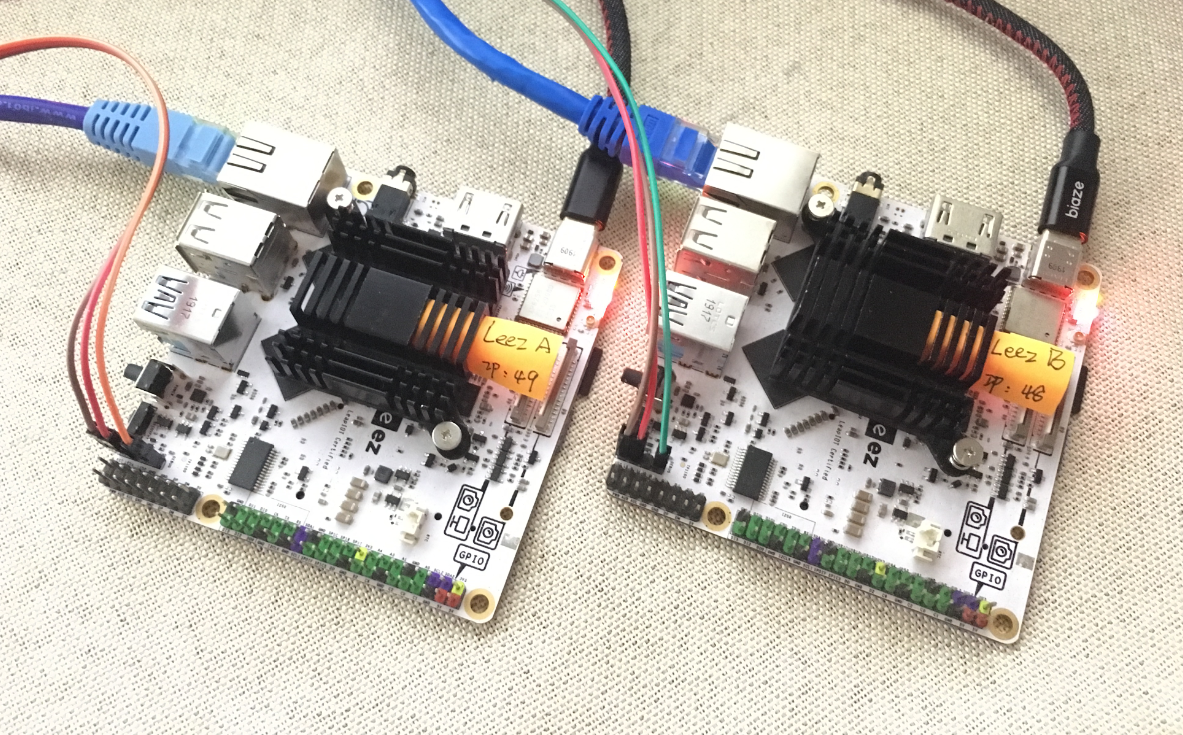
栗子派分布式编译集群
本文又是集群,这次是分布式编译集群,硬件还是两块栗子派P710开发板:  软件选用分布式C/C++/ObjC 编译器 dsitcc  #### distcc分布式编译器 主要...
robe_zhang
2020-04-18 22:22:01
浏览量:1127
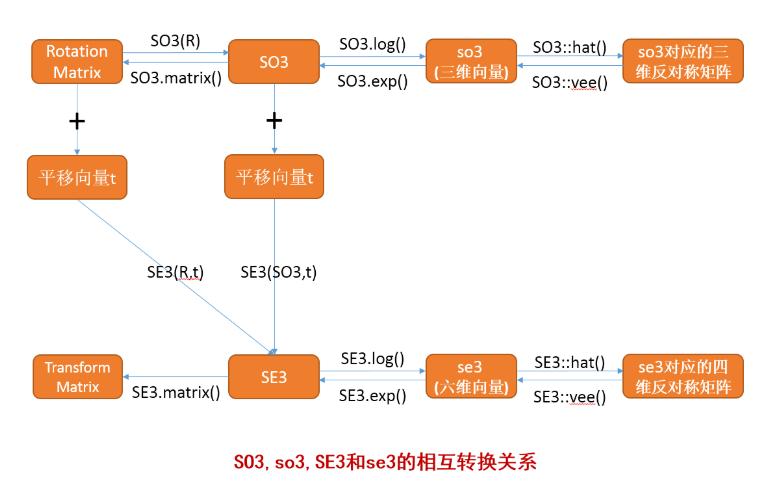
【7天搞定视觉SLAM】番外3——李代数库Sophus的使用
# Sophus的介绍 > Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。但是Eigen库提供了集合模块,但没有提供李代数的支持。一个较好的李群和李代数的库是Sophus库,它很好的支持了SO(3),so(3),SE(3)和se(3)。Sophus库是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类...
hero_chao
2020-04-19 14:56:46
浏览量:2635
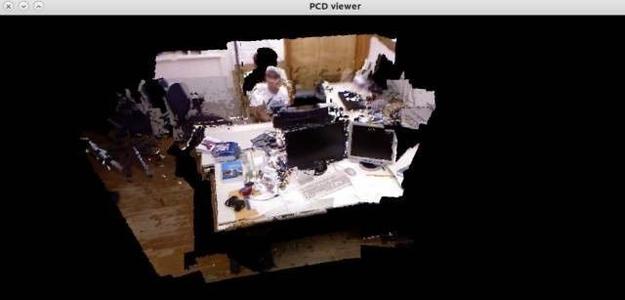
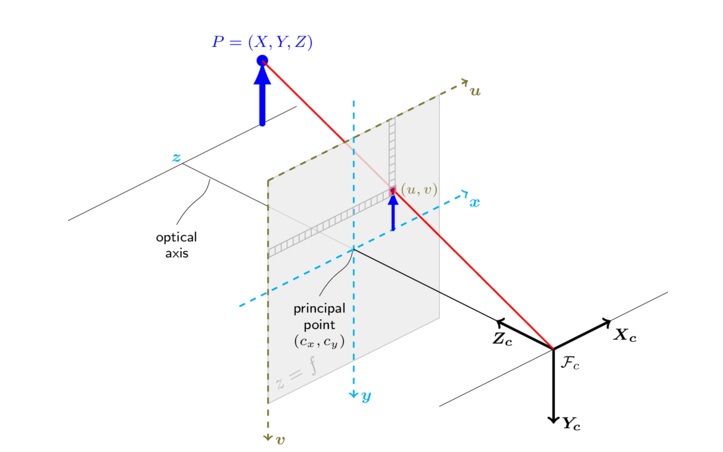
【7天搞定视觉SLAM】第四天——相机与图像
# 一、相机 ## 1.相机模型  视觉SLAM涉及到的坐标系包括:世界坐标系、相机坐标系、图像坐标系、像素坐标系等。 相机的基本原理是针孔相机模型,什么是针孔相机模型? > 物体发出的光线,经过小孔或透镜后,在密封箱的聚焦屏上生成....
hero_chao
2020-04-20 11:46:02
浏览量:1438
远程登录操作系统——终端模拟器的使用
# 1.前言  作为一个工程师或者准工程师,通常会涉及到不止一个操作系统,最为常见的就是LINUX操作系统。从广泛使用的UBUNTU到国产的DEEPIN,这里推荐大家了解一下DEEPIN系统,做的还不错啦。 
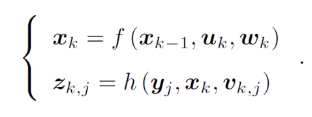
# 一、状态估计 ## 1.什么是状态估计 > 状态估计(state es
ti
ma
ti
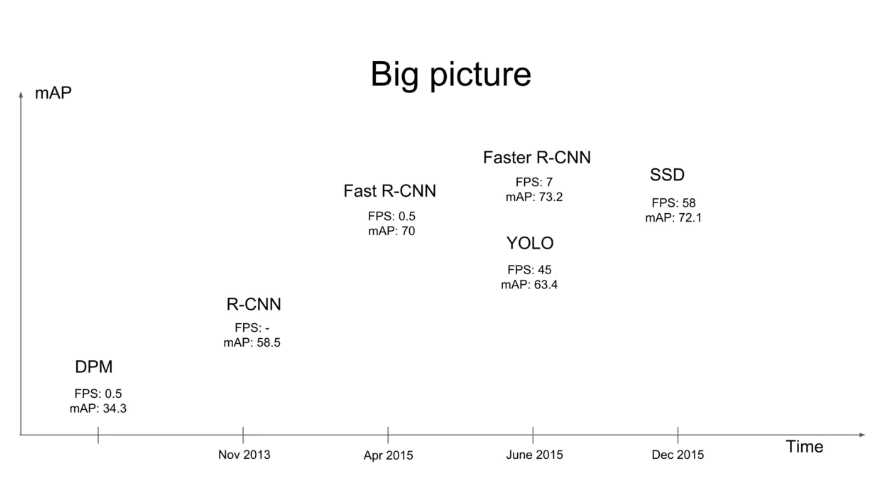
on)根据可获取的量测数据估算动态系统内部状态的方法。对系统的输入和输出进行测量而得到的数据只能反映系统的外部特性,而系统的动态规律需要用内部(通常无法直接测量)状态变量来描述。因此状态估计对于了解和控制一个系统具有重要意义。  和其他同为深度学习目标检测算法相比,YOLO算法实时性更加好,精度也很高,因为其采用了端到端的网络。 ...
hero_chao
2020-04-21 16:51:42
浏览量:1821
设置树莓派wifi的几种方式
树莓派网络连接方式有有线和无线两种方式,有线连接基本不需要进行设置,只需要插上网线即可,故本文着重讲解在几种不同的方式下对树莓派进行无线设置。 ## 设备 在树莓派上设置Wifi上需要使用以下设备。 #### 必需的 - 树莓派 - Micro SD卡 - Wifi无线网卡(树莓派3代以上内置无线模块,不需要) - 树莓...
科技爱好者博客
2020-04-22 16:34:19
浏览量:2588
在树莓派上安装OpenCV
在本指南中,我们将引导您完成在Raspberry Pi上设置OpenCV的过程。 成功将OpenCV安装到Raspberry Pi上需要几个不同的步骤,并且要有一定的耐心。 对于那些不知道什么是OpenCV的人。它是一个包含不同编程功能的库,旨在处理实时计算机视觉。 使用计算机视觉,您可以实时解释图像和视频。使您可以相对轻松地执行诸如运动检...
科技爱好者博客
2020-04-22 16:50:01
浏览量:1239
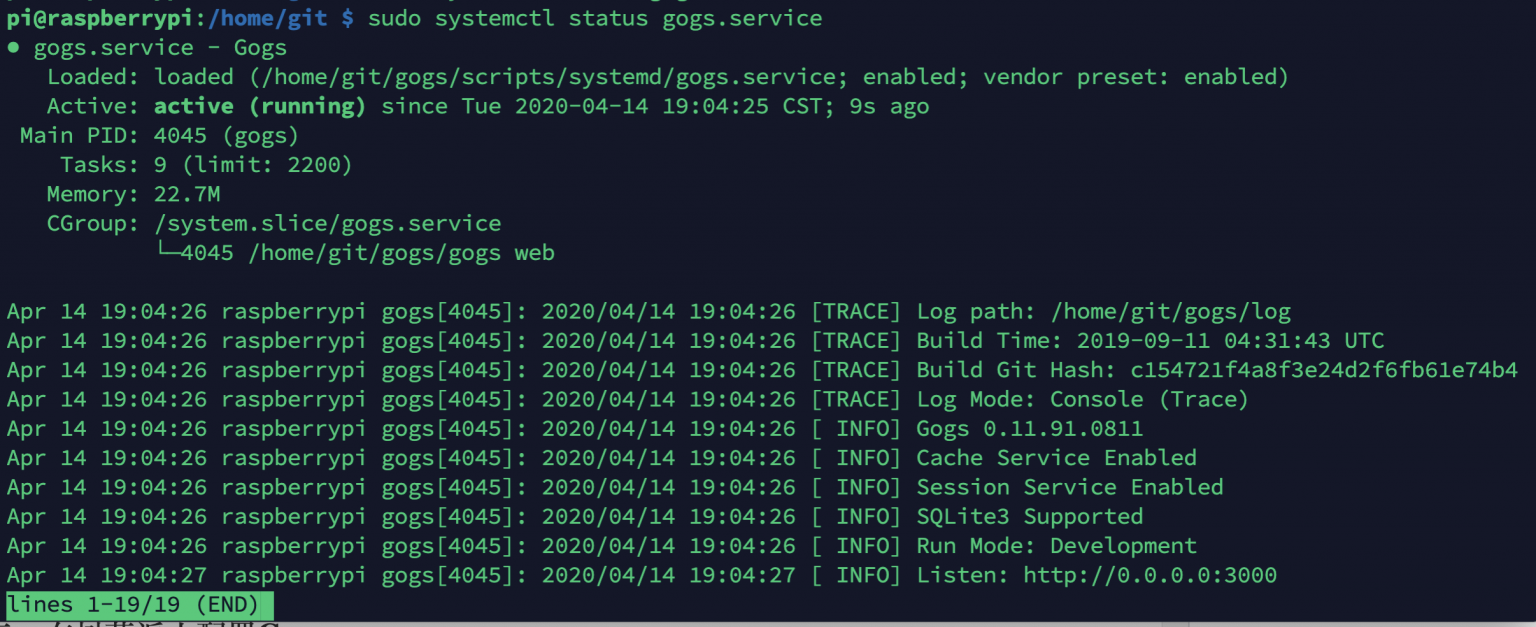
在树莓派上安装Gogs搭建git服务器
在本树莓派Gogs教程中,我们将教你在树莓派Raspbian操作系统上安装Gogs ,从而搭建自己的Git服务。 Gogs是使用[Go编程语言](https://golang.org/)编写的性能友好的[Git Web界面,](https://gogs.io/)它使在树莓派上设置和管理GIT存储库变得非常简单。 Gogs可跨平台安装,并且占用内存很小,一个便宜的树莓派就足以满足 Go...
科技爱好者博客
2020-04-22 17:04:04
浏览量:530
Arduino制作PM2.5测量仪(使用GP2Y1010AU0F灰尘传感器)
本文使用Arduino连接GP2Y1010AU0F灰尘传感器,打造一个低成本的PM2.5测量仪,实时检测空气质量。以下是教程。 ## 一、GP2Y1010AU0F灰尘传感器原理介绍 本文再详细介绍下这个传感器的测量原理。 **这是传感器内部电路图** [
# 一、高斯牛顿法 ## 1.简介 什么是高斯牛顿法? > 高斯一牛顿迭代法(Gauss-Newton itera
ti
on method)是非线性回归模型中求回归参数进行最小二乘的一种迭代方法,该法使用泰勒级数展开式去近似地代替非线性回归模型,然后通过多次迭代,多次修正回归系数,使回归系数不断逼近非线性回归模型的最佳回归系数,最后使原模......
hero_chao
2020-04-22 19:52:26
浏览量:795
ROS机器人操作系统的安装与使用
# 1.ubuntu ## 1)简介  > Ubuntu是一个以桌面应用为主的Linux操作系统,其名称来自非洲南部祖鲁语或豪萨语的“ubuntu"一词,意思是“人性”“我的存在是因为大家的存在",是非洲传统的一种价值观。Ubuntu基于Debian发行版和Gnome桌....
hero_chao
2020-04-23 14:39:13
浏览量:1588
在树莓派上安装MongoDB数据库
在这篇教程中,我们将引导您完成在树莓派上安装和设置[MongoDB服务器](https://www.mongodb.com/)软件的过程。 我们将向您展示在树莓派上安装MongoDB的两种不同方式。 第一条方式是在Raspbian上安装MongoDB。Raspbian的存储库提供了较旧版本的MongoDB(**2.4.14**),因为较新的ARM构建的MongoDB需要ARM64,而Raspbia...
科技爱好者博客
2020-04-23 16:02:16
浏览量:470
树莓派OpenWrt扩容磁盘分区大小
用树莓派刷了OpenWrt当路由器,但是刷完后发现16G的内存卡,使用的容量还不到1G,这就导致用树莓派下载电影时提示磁盘容量不足,所以需要对磁盘分区进行扩容。本文是将分区全部扩展的过程,所使用的方法不局限于树莓派OpenWrt扩容,Linux服务器和电脑扩容也可以按照本文的方法进行。 首先看下未扩容前的sd卡容量 `...
科技爱好者博客
2020-04-23 16:07:36
浏览量:3851
关闭树莓派的电源指示灯和状态指示灯
树莓派的电源指示灯只要加电就是一直亮的,而且还很亮,尤其在晚上,特别晃眼,我就想能不能关掉,经过实验,终于找到了关闭树莓派电源指示灯的方法,下面是完整的过程,以供大家参考。 实现的原理并不难,在给树莓派添加一个硬件开、关机按键中,我已经讲过了利用`/boot/config.txt`文件来给树莓派添加一个硬件的开关,.....
科技爱好者博客
2020-04-23 16:15:40
浏览量:1156
«
8
9
10
11
12
13
14
15
16
17
»