电子工程师技术服务社区
公告
登录
|
注册
首页
技术问答
厂商活动
正点原子
板卡试用
资源库
下载
文章
社区首页
文章
树莓派基础实验32:DS1302实时时钟模块实验
分 享
扫描二维码分享
树莓派基础实验32:DS1302实时时钟模块实验
树莓派
python
DS1302时钟
张国平
关注
发布时间: 2020-06-04
丨
阅读: 3995
## 一、介绍 现在有很多流行的串行时钟芯片,如DS1302,DS1307,PCF8485等,由于简单的接口,低成本和易用性,他们被广泛应用于电话、传真、便携式仪器等产品领域。在本实验中,我们将使用DS1302实时时钟(RTC)模块获取当前日期和时间。 DS1302可以用于数据记录,特别是对某些具有特殊意义的数据点的记录,能实现数据与出现该数据的时间同时记录。这种记录对长时间的连续测控系统结果的分析,及对异常数据出现的原因的查找具有重要意义。 传统的数据记录方式是隔时采样或定时采样,没有具体的时间记录,因此,只能记录数据而无法准确记录其出现的时间;若采用单片机计时,一方面需要采用计数器,占用硬件资源,另一方面需要设置中断、查询等,同样耗费单片机的资源,而且,某些测控系统可能不允许。但是,如果在系统中采用时钟芯片DS1302,则能很好地解决这个问题。 ## 二、组件 ★Raspberry Pi 3主板*1 ★树莓派电源*1 ★40P软排线*1 ★DS1302实时时钟模块*1 ★面包板*1 ★跳线若干 ## 三、实验原理   ####1. DS1302的特点 DS1302是DALLAS(达拉斯)公司出的一款涓流充电时钟芯片,2001年DALLAS被MAXIM(美信)收购。 DS1302实时时钟芯片广泛应用于电话、传真、便携式仪器等产品领域,他的主要性能指标如下: 1、DS1302是一个实时时钟芯片,可以提供秒、分、小时、日期、月、年等信息,并且还有软年自动调整的能力,可以通过配置AM/PM来决定采用24小时格式还是12小时格式。 2、拥有31字节数据存储RAM。 3、串行I/O通信方式,相对并行来说比较节省IO口的使用。 4、DS1302的工作电压比较宽,大概是2.0V~5.5V都可以正常工作。 5、DS1302这种时钟芯片功耗一般都很低,它在工作电压2.0V的时候,工作电流小于300nA。 6、DS1302共有8个引脚,有两种封装形式,一种是DIP-8封装,芯片宽度(不含引脚)是300mil,一种是SOP-8封装,有两 种宽度,一种是150mil,一种是208mil。我们看一下DS1302的引脚封装图:  7、当供电电压是5V的时候,兼容标准的TTL电平标准,这里的意思是,可以完美的和单片机进行通信。 8、由于DS1302是DS1202的升级版本,所以所有的功能都兼容DS1202。此外DS1302有两个电源输入,一个是主电源, 另外一个是备用电源,比如可以用电池或者大电容,这样是为了保证系统掉电的情况下,我们的时钟还会继续走。如果使用的是充电电池,还可以在正常工作时,设置充电功能,给我们的备用电池进行充电。 DS1302的特点第二条“拥有31字节数据存储RAM”,这是DS1302额外存在的资源。这31字节的RAM相当于一个存储器一样,我们编写单片机程序的时候,可以把我们想存储的数据存储在DS1302里边,需要的时候读出来,这块功能和EEPROM有点类似,相当于一个掉电丢失数据的“EEPROM”,如果我们的时钟电路加上备用电池,那么这31个字节的RAM就可以替代EEPROM的功能了。 DS1302一共有8个引脚,下边要根据引脚分布图和典型电路图来介绍一下每个引脚的功能: 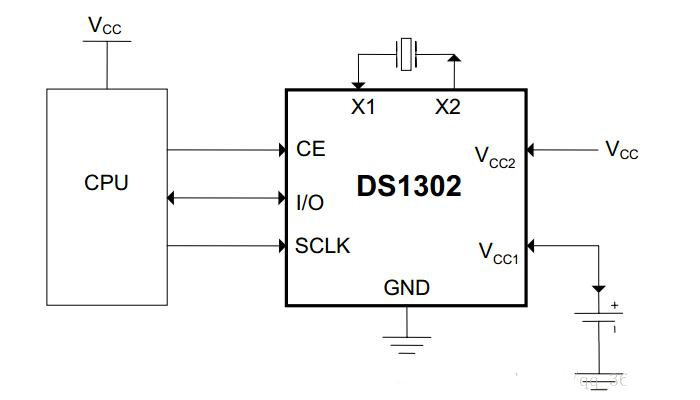  DS1302的电路一个重点就是时钟电路,它所使用的晶振是一个32.768k的晶振,晶振外部也不需要额外添加其他的电容或者电阻电路了。时钟的精度,首先取决于晶振的精度以及晶振的引脚负载电容。如果晶振不准或者负载电容过大过小,都会导致时钟误差过大。在这一切都搞定后,最终一个考虑因素是晶振的温漂。随着温度的变化,晶振往往精度会发生变化,因此,在实际的系统中,其中一种方法就是经常校对。比如我们所用的电脑的时钟,通常我们会设置一个选项“将计算机设置于internet时间同步”。选中这个选项后,一般可以过一段时间,我们的计算机就会和internet时间校准同步一次。 ####2. DS1302寄存器 对DS1302的操作就是对其内部寄存器的操作,DS1302内部共有12个寄存器,其中有7个寄存器与日历、时钟相关,存放的数据位为BCD码形式。此外,DS1302还有年份寄存器、控制寄存器、充电寄存器、时钟突发寄存器及与RAM相关的寄存器等。时钟突发寄存器可一次性顺序读/写除充电寄存器以外的寄存器。 DS1302的一条指令一个字节8位,其中第7位(即最高位)是固定1,这一位如果是0的话,那写进去是无效的。第6位是选择RAM还是CLOCK的,这里主要讲CLOCK时钟的使用,它的RAM功能我们不用,所以如果选择CLOCK功能,第6位是0,如果要用RAM,那第6位就是1。从第5到第1位,决定了寄存器的5位地址,而第0位是读写位,如果要写,这一位就是0,如果要读,这一位就是1。  DS1302时钟的寄存器,其中8个和时钟有关的,5位地址分别是00000一直到00111这8个地址,还有一个寄存器的地址是01000,这是涓流充电所用的寄存器,我们这里不讲。在DS1302的数据手册里的地址,直接把第7位、第6位和第0位值给出来了,所以指令就成了80H、81H那些了,最低位是1,那么表示读,最低位是0表示写。  寄存器一:最高位CH是一个时钟停止标志位。如果我们的时钟电路有备用电源部分,上电后,我们要先检测一下这一位,如果这一位是0,那说明我们的时钟在系统掉电后,由于备用电源的供给,时钟是持续正常运行的;如果这一位是1,那么说明我们的时钟在系统掉电后,时钟部分不工作了。若我们的Vcc1悬空或者是电池没电了,当我们下次重新上电时,读取这一位,那这一位就是1,我们可以通过这一位判断时钟在单片机系统掉电后是否持续运行。剩下的7位高3位是秒的十位,低4位是秒的个位,这里注意再提一次,DS1302内部是BCD码,而秒的十位最大是5,所以3个二进制位就够了。 寄存器二:bit7没意义,剩下的7位高3位是分钟的十位,低4位是分钟的个位。 寄存器三:bit7是1的话代表是12小时制,是0的话代表是24小时制,bit6固定是0,bit5在12小时制下0代表的是上午,1代表的是下午,在24小时制下和bit4一起代表了小时的十位,低4位代表的是小时的个位。 寄存器四:高2位固定是0,bit5和bit4是日期的十位,低4位是日期的个位。 寄存器五:高3位固定是0,bit4是月的十位,低4位是月的个位。 寄存器六:高5位固定是0,低3位代表了星期。 寄存器七:高4位代表了年的十位,低4位代表了年的个位。这里特别注意,这里的00到99年指的是2000年到2099年。 寄存器八:bit7是一个保护位,如果这一位是1,那么是禁止给任何其他的寄存器或者那31个字节的RAM写数据的。因此在写数据之前,这一位必须先写成0。 ####3. DS1302的时序 物理上,DS1302的通信接口由3个口线组成,即RST,SCLK,I/O。其中RST从低电平变成高电平启动一次数据传输过程,SCLK是时钟线,I/O是数据线。这个DS1302的通信线定义和SPI很像,事实上,DS1302的通信是SPI的变异种类,它用了SPI的通信时序,但是通信的时候没有完全按照SPI的规则来,下面我们介绍DS1302的变异SPI通信方式。  请注意数据是对时钟信号敏感的,而且一般数据是在下降沿写入,上升沿读出。平时SCLK保持低电平,当需要写命令或者写数据时,在时钟输出变为高电平之前先输出数据;当需要读数据时,在时钟输出变为高电平之前采样读取数据。 ## 四、实验步骤 **第1步:**连接电路。 | 树莓派 | T型转接板 | BMP180气压传感器 | |:-:|:-:|:-:| |GPIO4|G23|SCL(CLK)| |GPIO5|G24|SDA(DAT)| |GPIO6|G25|RST| |5V|5V|VCC| |GND|GND|GND|   **第2步:**DS1302的Python程序比较复杂,我们先编写一个模块ds1302.py,在里面创建一个类DS1302(),在里面编写读取时钟信息等方法。 ```Python ''' RTC_DS1302 ''' ''' ------------------------------------------------------------------------ ''' ''' 控制处理实时时钟DS1302的类。 ''' import time import RPi.GPIO from datetime import datetime class DS1302: CLK_PERIOD = 0.00001 DOW = [ "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday", "Sunday" ] def __init__(self, scl=23, rst=25, io=24): self.scl = scl self.rst = rst self.io = io # 关闭GPIO警告。 RPi.GPIO.setwarnings(False) # 配置树莓派GPIO接口。 RPi.GPIO.setmode(RPi.GPIO.BCM) # 初始化 DS1302 通信。 self.init_ds1302() # 确保写保护已关闭。 self.write_byte(int("10001110", 2)) self.write_byte(int("00000000", 2)) # 确保涓流充电模式被关闭。 self.write_byte(int("10010000", 2)) self.write_byte(int("00000000", 2)) # 结束 DS1302 通信。 self.end_ds1302() self.datetime = {} def CloseGPIO(self): ''' 在结束前关闭 Raspberry Pi GPIO 。 ''' RPi.GPIO.cleanup() def init_ds1302(self): ''' 使用DS1302 RTC启动一个事务。 ''' RPi.GPIO.setup(self.scl, RPi.GPIO.OUT, initial=0) RPi.GPIO.setup(self.rst, RPi.GPIO.OUT, initial=0) RPi.GPIO.setup(self.io, RPi.GPIO.OUT, initial=0) RPi.GPIO.output(self.scl, 0) RPi.GPIO.output(self.io, 0) time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.rst, 1) def end_ds1302(self): ''' 使用DS1302 RTC结束一个事务。 ''' RPi.GPIO.setup(self.scl, RPi.GPIO.OUT, initial=0) RPi.GPIO.setup(self.rst, RPi.GPIO.OUT, initial=0) RPi.GPIO.setup(self.io, RPi.GPIO.OUT, initial=0) RPi.GPIO.output(self.scl, 0) RPi.GPIO.output(self.io, 0) time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.rst, 0) def write_byte(self, Byte): ''' 将一个字节的数据写入DS1302 RTC。 ''' for Count in range(8): time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.scl, 0) Bit = Byte % 2 Byte = int(Byte / 2) time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.io, Bit) time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.scl, 1) def read_byte(self): ''' 将一个字节的数据读入DS1302 RTC。 ''' RPi.GPIO.setup(self.io, RPi.GPIO.IN, pull_up_down=RPi.GPIO.PUD_DOWN) Byte = 0 for Count in range(8): time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.scl, 1) time.sleep(self.CLK_PERIOD) RPi.GPIO.output(self.scl, 0) time.sleep(self.CLK_PERIOD) Bit = RPi.GPIO.input(self.io) Byte |= ((2 ** Count) * Bit) return Byte def write_ram(self, Data): ''' 向RTC RAM写一条消息。 ''' # Initiate DS1302 communication. self.init_ds1302() # Write address byte. self.write_byte(int("11111110", 2)) # Write data bytes. for Count in range(len(Data)): self.write_byte(ord(Data[Count:Count + 1])) for Count in range(31 - len(Data)): self.write_byte(ord(" ")) # End DS1302 communication. self.end_ds1302() def read_ram(self): ''' 向RTC RAM读一条消息。 ''' # Initiate DS1302 communication. self.init_ds1302() # Write address byte. self.write_byte(int("11111111", 2)) # Read data bytes. Data = "" for Count in range(31): Byte = self.read_byte() Data += chr(Byte) # End DS1302 communication. self.end_ds1302() return Data def set_datetime(self, year, month, day, hour, minute, second, dayOfWeek=0): ''' 写日期和时间给RTC,这里我放弃了星期几的设置,传递的默认值。 ''' if not self.check_sanity(): return False # Initiate DS1302 communication. self.init_ds1302() # Write address byte. self.write_byte(int("10111110", 2)) # Write seconds data. self.write_byte((second % 10) | int(second / 10) * 16) # Write minute data. self.write_byte((minute % 10) | int(minute / 10) * 16) # Write hour data. self.write_byte((hour % 10) | int(hour / 10) * 16) # Write day data. self.write_byte((day % 10) | int(day / 10) * 16) # Write month data. self.write_byte((month % 10) | int(month / 10) * 16) # Write day of week data. self.write_byte((dayOfWeek % 10) | int(dayOfWeek / 10) * 16) # Write year data. self.write_byte((year % 100 % 10) | int(year % 100 / 10) * 16) # Make sure write protect is turned off. self.write_byte(int("00000000", 2)) # Make sure trickle charge mode is turned off. self.write_byte(int("00000000", 2)) # End DS1302 communication. self.end_ds1302() def get_datetime(self): ''' 从RTC中读取日期和时间。 ''' # Initiate DS1302 communication. self.init_ds1302() # Write address byte. self.write_byte(int("10111111", 2)) # Read date and time data. Data = "" Byte = self.read_byte() second = (Byte % 16) + int(Byte / 16) * 10 Byte = self.read_byte() minute = (Byte % 16) + int(Byte / 16) * 10 Byte = self.read_byte() hour = (Byte % 16) + int(Byte / 16) * 10 Byte = self.read_byte() day = (Byte % 16) + int(Byte / 16) * 10 Byte = self.read_byte() month = (Byte % 16) + int(Byte / 16) * 10 Byte = self.read_byte() day_of_week = ((Byte % 16) + int(Byte / 16) * 10) - 1 Byte = self.read_byte() year = (Byte % 16) + int(Byte / 16) * 10 + 2000 # End DS1302 communication. self.end_ds1302() return datetime(year, month, day, hour, minute, second) def check_sanity(self): "检查时钟是否正常。如果时钟正常则返回True,否则返回False" dt = self.get_datetime() if dt.year == 2000 or dt.month == 0 or dt.day == 0: return False if dt.second == 80: return False return True def format_time(dt): if dt is None: return "" fmt = "%m/%d/%Y %H:%M" return dt.strftime(fmt) def parse_time(s): fmt = "%m/%d/%Y %H:%M" return datetime.strptime(s, fmt) ``` **第3步:**编写实际控制程序,导入上面的模块ds1302,只使用到其中部分方法函数。运行本文件,先设置初始时间,然后不断循环读取并打印时钟信息。 ```Python #!/usr/bin/env python from datetime import datetime import time import ds1302 #导入模块ds1302 rtc = ds1302.DS1302() #通过模块ds1302中的类DS1302()创建一个实例rtc def setup(): ''' 写入初始时间 ''' print '' print '' print rtc.get_datetime() print '' print '' a = raw_input( "Do you want to setup date and time?(y/n) ") if a == 'y' or a == 'Y': date = raw_input("Input date:(YYYY MM DD) ") time = raw_input("Input time:(HH MM SS) ") date = date.split() time = time.split() print '' print '' rtc.set_datetime(int(date[0]),int(date[1]), int(date[2]),\ int(time[0]), int(time[1]), int(time[2])) dt = rtc.get_datetime() print "You set the date and time to:", dt def loop(): ''' 显示实时时间 ''' while True: a = rtc.get_datetime() print a time.sl<ickey>eep(1) def destory(): GPIO.cleanup() # Release resource if __name__ == '__main__': # Program start from here setup() try: loop() except KeyboardInterrupt: destory() ``` 实验结果示例:  
原创作品,未经权利人授权禁止转载。详情见
转载须知
。
举报文章
点赞
(
1
)
张国平
关注
评论
(2)
登录后可评论,请
登录
或
注册
仲夏晨光
323
天前...
作者大大开发IDE用的什么?这个python代码能在单片机上跑?
0
回复
发布
张国平
回复
仲夏晨光
310
天前...
IDE就是树莓派自带的Python2,单片机上能否跑,要看你的单片机支持不
0
回复
发布
相关文章推荐
MK-米客方德推出工业级存储卡
Beetle ESP32 C3 蓝牙数据收发
Beetle ESP32 C3 wifi联网获取实时天气信息
开箱测评Beetle ESP32-C3 (RISC-V芯片)模块
正点原子数控电源DP100测评
DP100试用评测-----开箱+初体验
Beetle ESP32 C3环境搭建
【花雕体验】16 使用Beetle ESP32 C3控制8X32位WS2812硬屏之二
X
你的打赏是对原创作者最大的认可
请选择打赏IC币的数量,一经提交无法退回 !
100IC币
500IC币
1000IC币
自定义
IC币
确定
X
提交成功 ! 谢谢您的支持
返回
我要举报该内容理由
×
广告及垃圾信息
抄袭或未经授权
其它举报理由
请输入您举报的理由(50字以内)
取消
提交





