电子工程师技术服务社区
登录
|
注册
公告
全部
论坛
问答
试用
文章
评测
下载
样片
社区首页
找到
33517
条结果
【ds
pi
C33】振荡器与定时器
# 前言 上节是做了ds
pi
C的准备工作,熟悉了开发环境与一些基本配置位的操作,项目种选用ds
pi
C芯片目的还是用来做电机控制的,对于电机控制来说,PWM,ADC,定时器是非常重要的功能,本节就开始介绍ds
pi
C的时钟配置,并使用定时器来验证。 首先,接入电路中的外部晶振是8M晶振,因此根据手册,可以选择主振荡器Posc: ...
KVIN
2019-09-25 16:35:05
浏览量:2082
【ds
pi
C33】UART收发数据
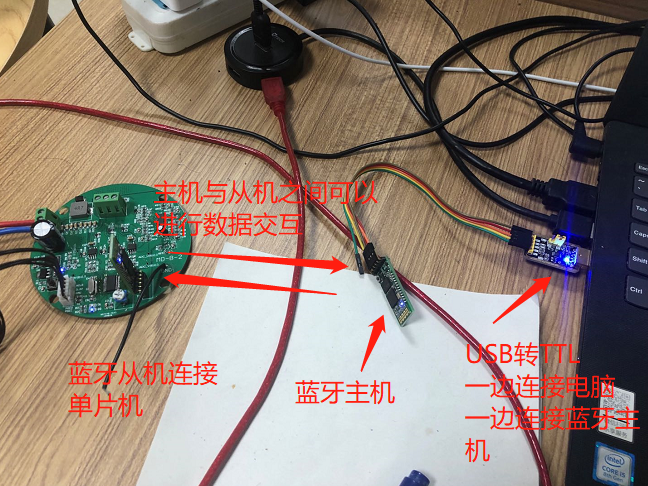
# 前言 串口是一个非常重要的工具,用这个可以非常简单的收发一些数据,串口的操作还是比其他协议简单很多,因此在工控芯片上串口非常普遍。本节就详细记录ds
pi
C33E芯片的串口寄存器配置以及使用过程。 首先需要把串口的硬件环境搭建好,我这里使用了一对蓝牙主从机,蓝牙主机连接USB转TTL模块连接电脑,蓝牙从机连接单...
KVIN
2019-09-30 10:28:01
浏览量:1634
【ds
pi
C33】PWM系列之真正独立PWM模式
# 前言 作为一款可用作电机控制的芯片,PWM肯定是芯片中的重点,一般来讲,做电机控制会用到PWM与互补PWM,使用SVPWM时会使用中心对齐模式PWM,有些芯片也叫做中央对齐模式PWM,而SVPWM是FOC矢量控制的基础,因此能不能产生中心对齐模式的PWM,便是判定一款芯片能不能使用FOC算法的依据。下面针对ds
pi
C33E系列的芯片,进行....
KVIN
2019-10-25 11:49:08
浏览量:2098
【ds
pi
C33】PWM系列之互补PWM与中心对齐模式
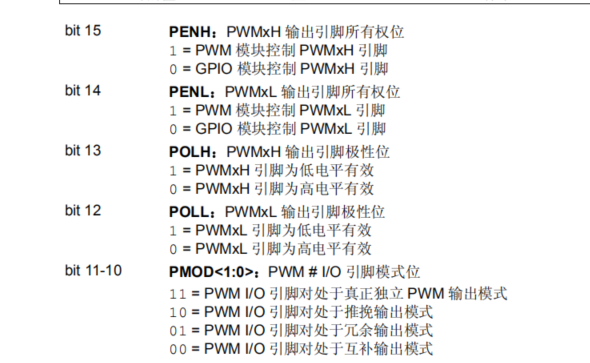
# 前言 上篇文章讲到简易的PWM,对于电机控制来说,常用的还是互补PWM,如果做FOC,还会用到中心对齐模式(中央对齐模式)。下面就来说说ds
pi
C33E芯片的互补PWM与中心对齐模式的PWM。 首先,先配置PWM引脚为互补输出模式,然后再配置相应的引脚。这一部分在IOCONx寄存器: 
[TOC] --- --- **难度:** ★★ **读者:** 适合有`C语言`或`Python`编程基础的读者。 --- 上期文章: 《 [树莓派4B-Wiring
pi
库的安装和使用](https://www.icxbk.com/article/preview?astatus=1&aid=1707) 》介绍了如何在树莓派上搭建Wiring
pi
库(C和Python版),并实现简单的点亮LED灯教程。本文及后续文章都将使用...
wybliw
2020-10-01 23:08:15
浏览量:5559
[树莓派系列] 使用Wiring
pi
库入门模拟舵机-SG90(C和Python)
[TOC] --- --- **难度:** ★★ **读者:** 适合有`C语言`或`Python`编程基础,对舵机和PWM等有一定了解的读者。 --- 往期相关文章: * 《 [树莓派4B-Wiring
pi
库的安装和使用](https://www.icxbk.com/article/preview?astatus=1&aid=1707) 》 * 《 [入门Wiring
pi
库的PWM接口](https://www.icxbk.com/article/deta...
wybliw
2020-10-16 21:53:26
浏览量:4264
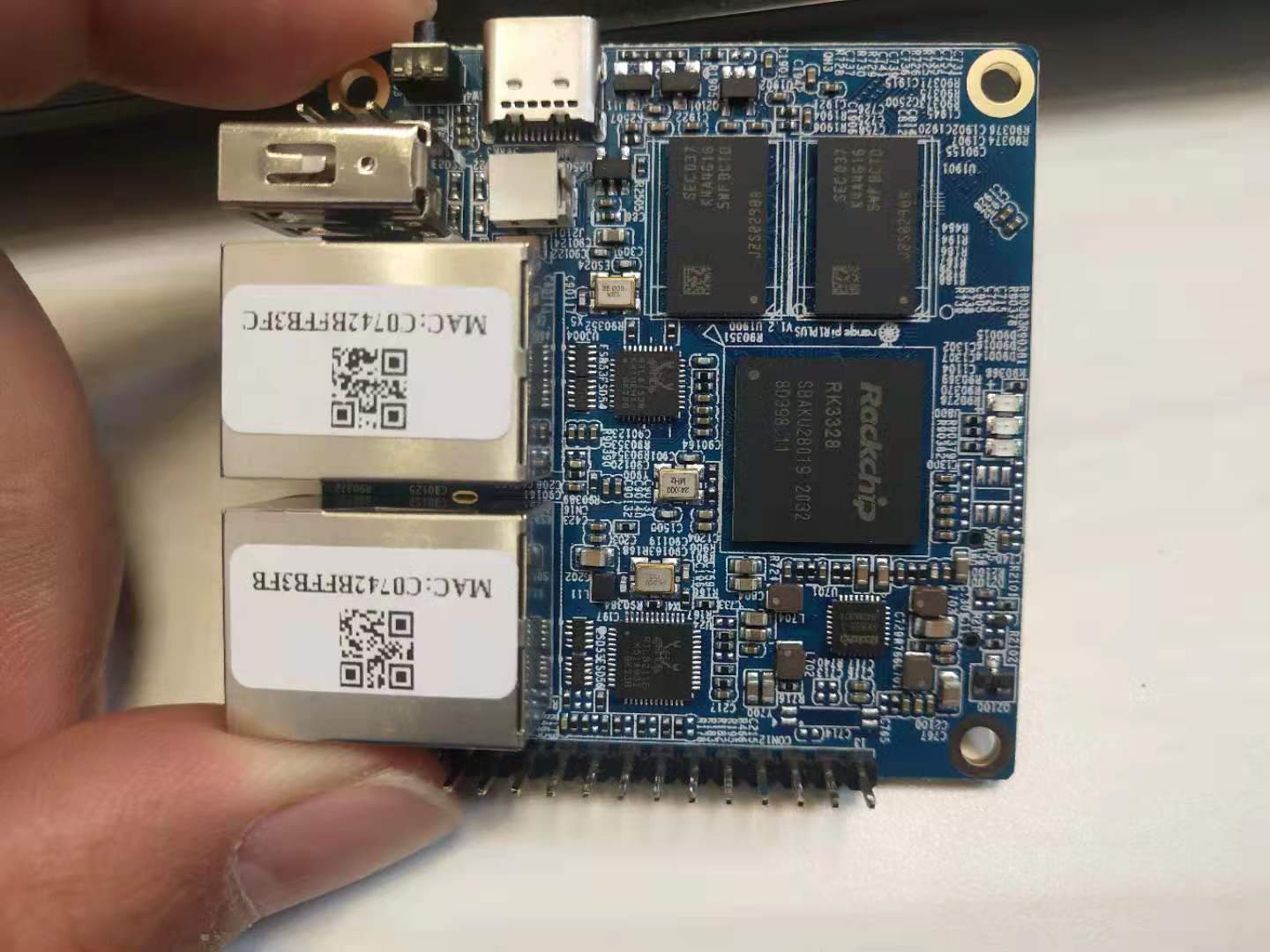
Orange
pi
R1 Plus 开发板试用测评之一:硬件分析
很高兴收到电子芯吧科的试用板卡,香橙派Orange
pi
R1 Plus是一款开源的单板电脑,蛮雀虽小,王脏俱全。新一代的arm开发板,它可以运行Android 9、Ubuntu、Debian、OpenWRT等操作系统,兼容树莓派。香橙派使用Rockchip RK3328芯片,同时拥有1GB DDR4内存。 采用Type-C供电,不用怕短路了。 正面图:  首先我们要...
皮皮学电子
2021-02-10 20:22:57
浏览量:1886
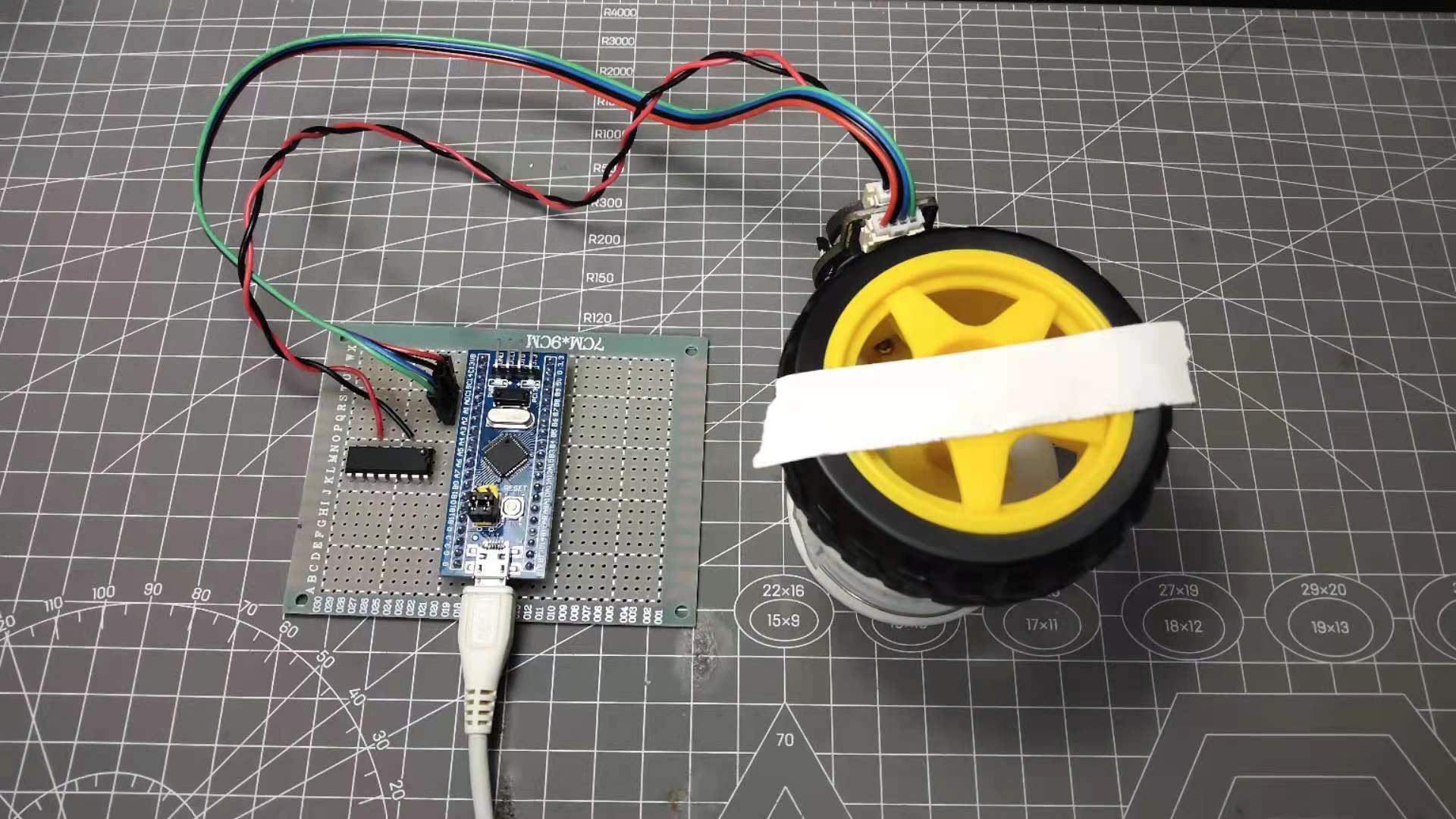
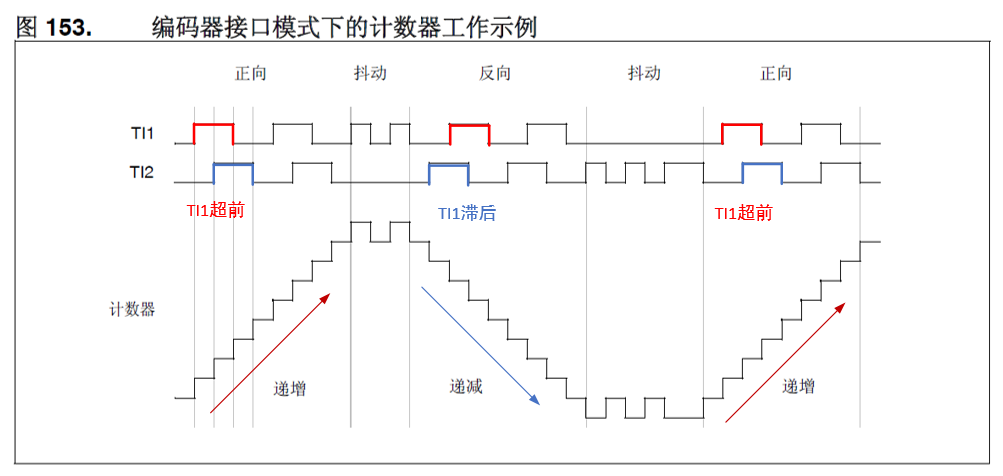
电机控制基础——定时器编码器模式使用与转速
计算
上篇介绍了**定时器捕获输入脉冲的原理**,那种方式是根据捕获的原理,手动切换上升沿与下降沿捕获,
计算
脉冲宽度的过程原理比较清晰,但编程操作起来比较麻烦。 对于电机测速用到的正交编码器,测速时需要捕获2路脉冲,如果使用上一篇介绍的方法,编程就较为复杂。还好单片机的通用定时器具有**专门的正交编码器接口**,....
码农爱学习
2021-03-13 00:43:55
浏览量:1409
【小熊派Bear
pi
-loT开发板连载】配置小熊派的串口(二)
# 中断 中断是
计算
机中的一个十分重要的概念,在现代
计算
机中毫无例外地都采用中断机制。在
计算
机执行程序的过程中,由于出现某个特殊情况(或称为"事件"),使得CPU中止现行程序,而转去执行处理该事件的处理程序(俗称中断处理或中断服务程序),待中断服务程序执行完毕,再返回断点继续执行原来的程序,这个过程称为中断...
瑟寒凌风
2021-03-29 21:51:44
浏览量:500
粉丝问答一|关于
计算
机补码和结构体的两个问题
> 哈喽,大家好。今天分享下,粉丝针对嵌入式软件开发面试知识点总结中的内容提出的两个问题。问题不难,但是容易掉坑里。而在笔试中,很多大厂都喜欢出这种题目来坑害小伙伴们。所以,大家在笔试前要扎实基础,做题的时候,要看清题目。 ## 问题一 ### 为什么-n=~ (n-1)=~ n+1? ### 解答 该问题来源于嵌入式软件开....
嵌入式与Linux那些事
2021-05-15 15:38:19
浏览量:254
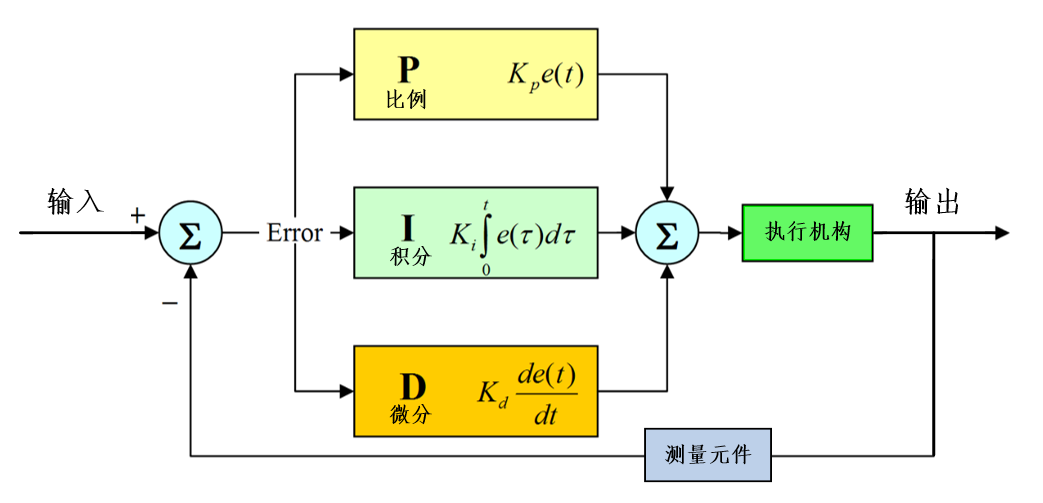
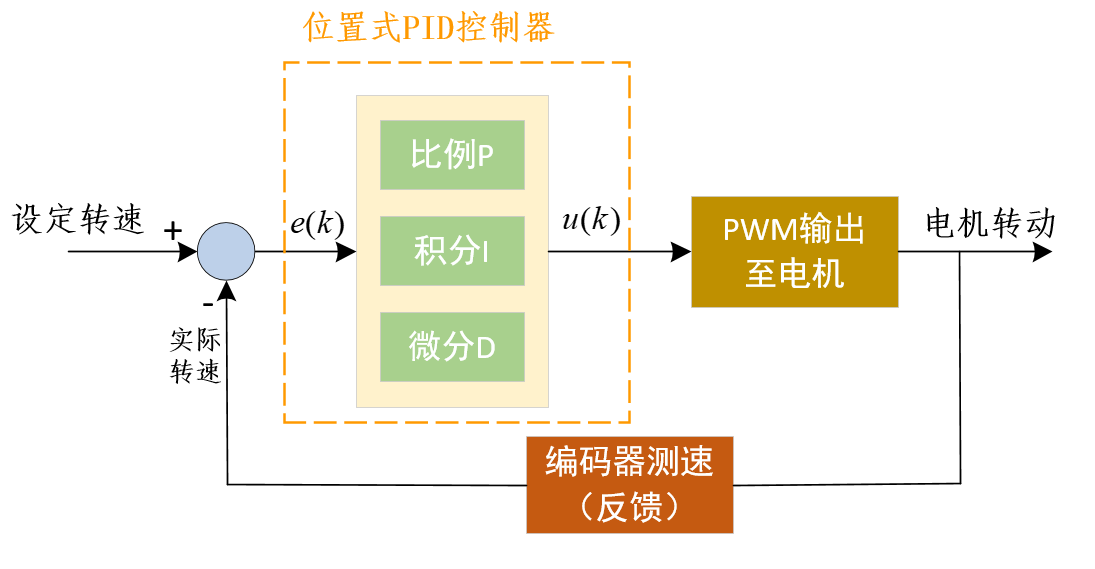
电机控制进阶——
pi
D速度控制
之前的几篇文章(电机控制基础篇),介绍的电机编码器原理、定时器输出PWM、定时器编码器模式测速等。 本篇在前几篇的基础上,继续来学习电机控制,通过
pi
D算法,来进行电机的速度控制,并进行实验测试。 #
pi
D基础
pi
D即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。
pi
D是经典的闭环控制....
码农爱学习
2021-05-19 00:11:00
浏览量:984
【小熊派Bear
pi
-loT开发板连载】MX25L1608存储器芯片开发
MX25L1608是一种存储芯片,用来保存单片机程序中的参数. 定义flash结构体: ```c typedef struct { uint16_t FCE_
pi
n; //片选引脚 G
pi
O_TypeDef* FCE_Port; //片选引脚端口号 S
pi
_Cfg FS
pi
; //设备所用S
pi
接口 }MX251608D_Cfg; //DATAFLASH结构体 ``` void GetMX251608Dx_ID(u8* ID,MX251608D_Cfg* Fx) 获取设备I...
瑟寒凌风
2021-05-24 23:19:32
浏览量:556
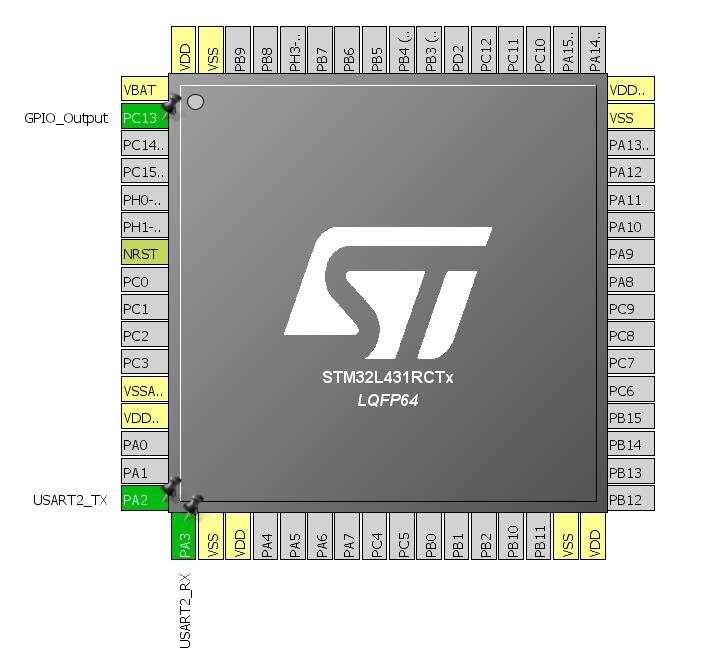
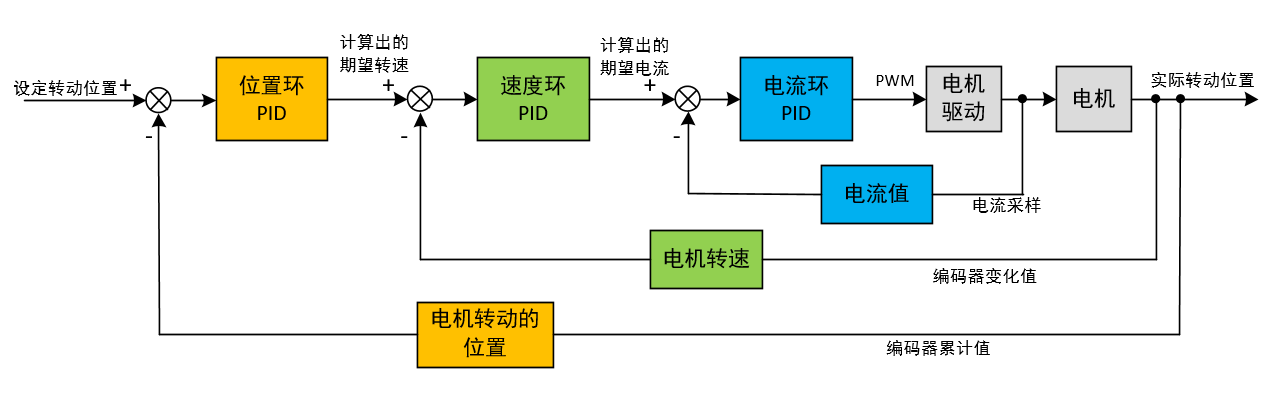
电机控制进阶2——
pi
D位置控制
上篇文章讲解了电机的速度环控制,可以控制电机快速准确地到达**指定速度**。 本篇来介绍电机的位置环控制,实现电机快速准确地转动到**指定位置**。 # 1 位置控制与速度控制的区别 回顾上篇,电机**速度
pi
D控制**的结构图如下,目标值是**设定的速度**,通过编码器获取**电机的转速**作为反馈,实现电机转速的控制。 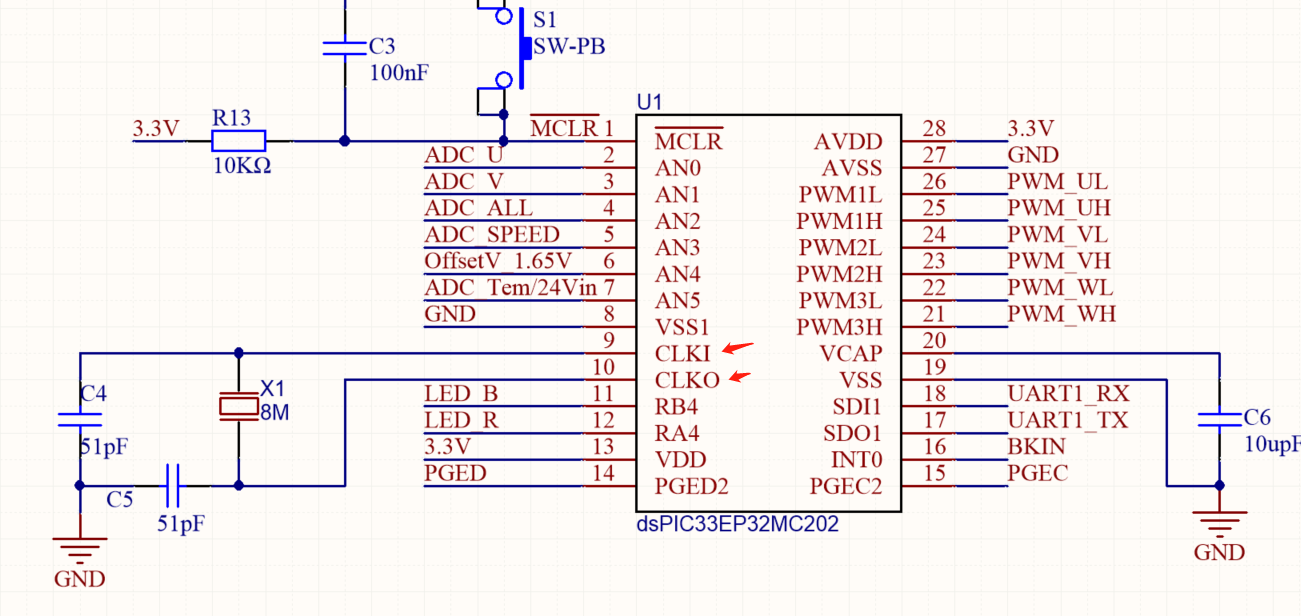


![[树莓派系列] 入门WiringPi库的PWM接口(C和Python)](https://cf05.ickimg.com/bbsimages/202010/f7f0b67a2185cc289c3ef573f60e79b0.png)
![[树莓派系列] 使用WiringPi库入门模拟舵机-SG90(C和Python)](https://cf04.ickimg.com/bbsimages/202010/5b4de50349c1ead62cc38b01a9ed3067.gif)