机器视觉SLAM
个人成就
获得 23 次赞
帮助过44人
0
0

ROS机器人操作系统的安装与使用
1.ubuntu 1)简介 >Ubuntu是一个以桌面应用为主的Linux操作系统,其名称来自非洲南部祖鲁语或豪萨语的“ubuntu"一词,意思是“人性”“我的存在是因为大家的存在",是非洲传统的一种价值观。Ubuntu基于Debian发行...

- 2020-04-23
- 阅读:41

【7天搞定视觉SLAM】第五天——非线性优化...
一、高斯牛顿法 1.简介 什么是高斯牛顿法? >高斯一牛顿迭代法(Gauss-Newtoniterationmethod)是非线性回归模型中求回归参数进行最小二乘的一种迭代方法,该法使用泰勒级数展开式去近似地代替非线性回归模型,然后通...

- 2020-04-22
- 阅读:12

【7天搞定视觉SLAM】番外2——Eigen的使用
Eigen 1.介绍 >Eigen目前最新的版本是3.4,除了C++标准库以外,不需要任何其他的依赖包。Eigen使用的CMake建立配置文件和单元测试,并自动安装。如果使用Eigen库,只需包特定模块的的头文件即可。 -矩阵的定义:...

- 2020-04-22
- 阅读:7
【7天搞定视觉SLAM】番外1——CMAKE的使用
1.什么是CMAKE? >CMake是一个跨平台的安装(编译)工具,可以用简单的语句来描述所有平台的安装(编译过程)。他能够输出各种各样的makefile或者project文件,能测试编译器所支持的C++特性,类似UNIX下的automake。...
- 2020-04-22
- 阅读:15
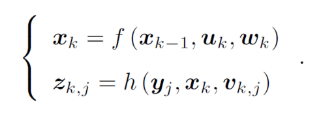
【7天搞定视觉SLAM】第五天——非线性优化...
一、状态估计 1.什么是状态估计 >状态估计(stateestimation)根据可获取的量测数据估算动态系统内部状态的方法。对系统的输入和输出进行测量而得到的数据只能反映系统的外部特性,而系统的动态规律需要用内部(...
- 2020-04-22
- 阅读:14
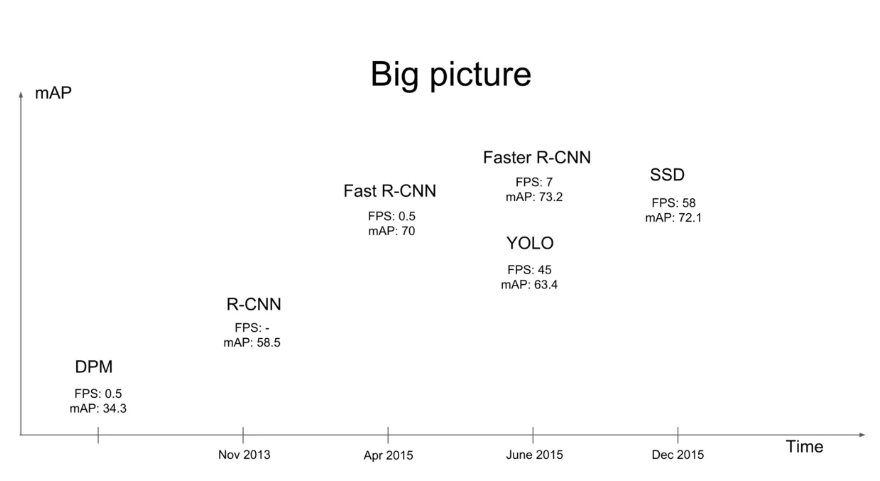
YOLO目标检测在LINUX系统下的配置使用
YOLO简介 文章作者发表了一篇《YouOnlyLookOnce:Unified,Real-TimeObjectDetection》提出目标检测方法,简称YOLO。 和其他同为深度学习目标检测算法相比,YOLO算法实时性更加好,精度也很高,因为其采用了端到端...

- 2020-04-21
- 阅读:40
远程登录操作系统——终端模拟器的使用
1.前言 作为一个工程师或者准工程师,通常会涉及到不止一个操作系统,最为常见的就是LINUX操作系统。从广泛使用的UBUNTU到国产的DEEPIN,这里推荐大家了解一下DEEPIN系统,做的还不错啦。 通常情况下,作为初...
- 2020-04-20
- 阅读:17

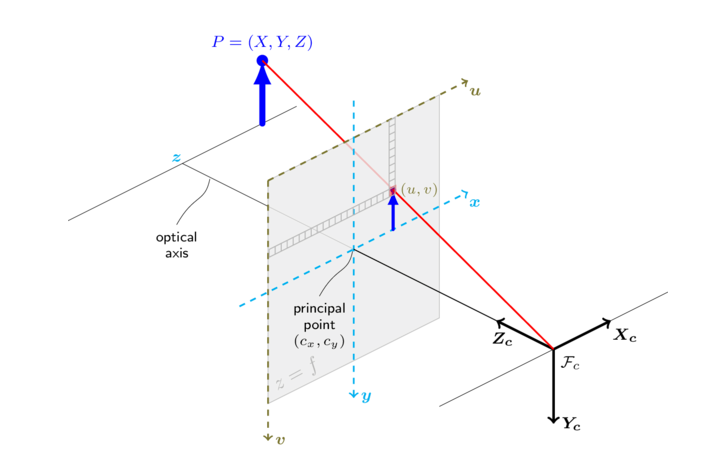
【7天搞定视觉SLAM】第四天——相机与图像
一、相机 1.相机模型 视觉SLAM涉及到的坐标系包括:世界坐标系、相机坐标系、图像坐标系、像素坐标系等。 相机的基本原理是针孔相机模型,什么是针孔相机模型? >物体发出的光线,经过小孔或透镜后,在密封箱的...
- 2020-04-20
- 阅读:111