电子工程师技术服务社区
公告
登录
|
注册
首页
技术问答
厂商活动
正点原子
板卡试用
资源库
下载
文章
社区首页
文章
树莓派综合项目3:AI视觉机械臂小车(四)红外避障
分 享
扫描二维码分享
树莓派综合项目3:AI视觉机械臂小车(四)红外避障
树莓派
AI小车
红外避障
张国平
关注
发布时间: 2021-05-26
丨
阅读: 1088
## 一、介绍 [树莓派综合项目3:AI视觉机械臂小车(一)蜂鸣器](https://www.icxbk.com/article/detail?aid=2130) [树莓派综合项目3:AI视觉机械臂小车(二)轻触按键](https://www.icxbk.com/article/detail?aid=2211) [树莓派综合项目3:AI视觉机械臂小车(三)基本运动](https://www.icxbk.com/article/detail?aid=2215) 本实验将实现履带车的红外避障功能,这个也比较简单,在以前的文章中有更基础细致的讲解可以参考: [树莓派基础实验28:红外避障传感器实验](https://www.jianshu.com/p/e4521781ea8c) [树莓派综合项目2:智能小车(五)红外避障](https://www.icxbk.com/article/preview?astatus=1&aid=2036) 本实验中不同的是采用了E18-D80NK漫反射式红外光电开关避障传感器模块。同时除了使用RPi.GPIO库编程以外,再使用gpiozero库来实现。 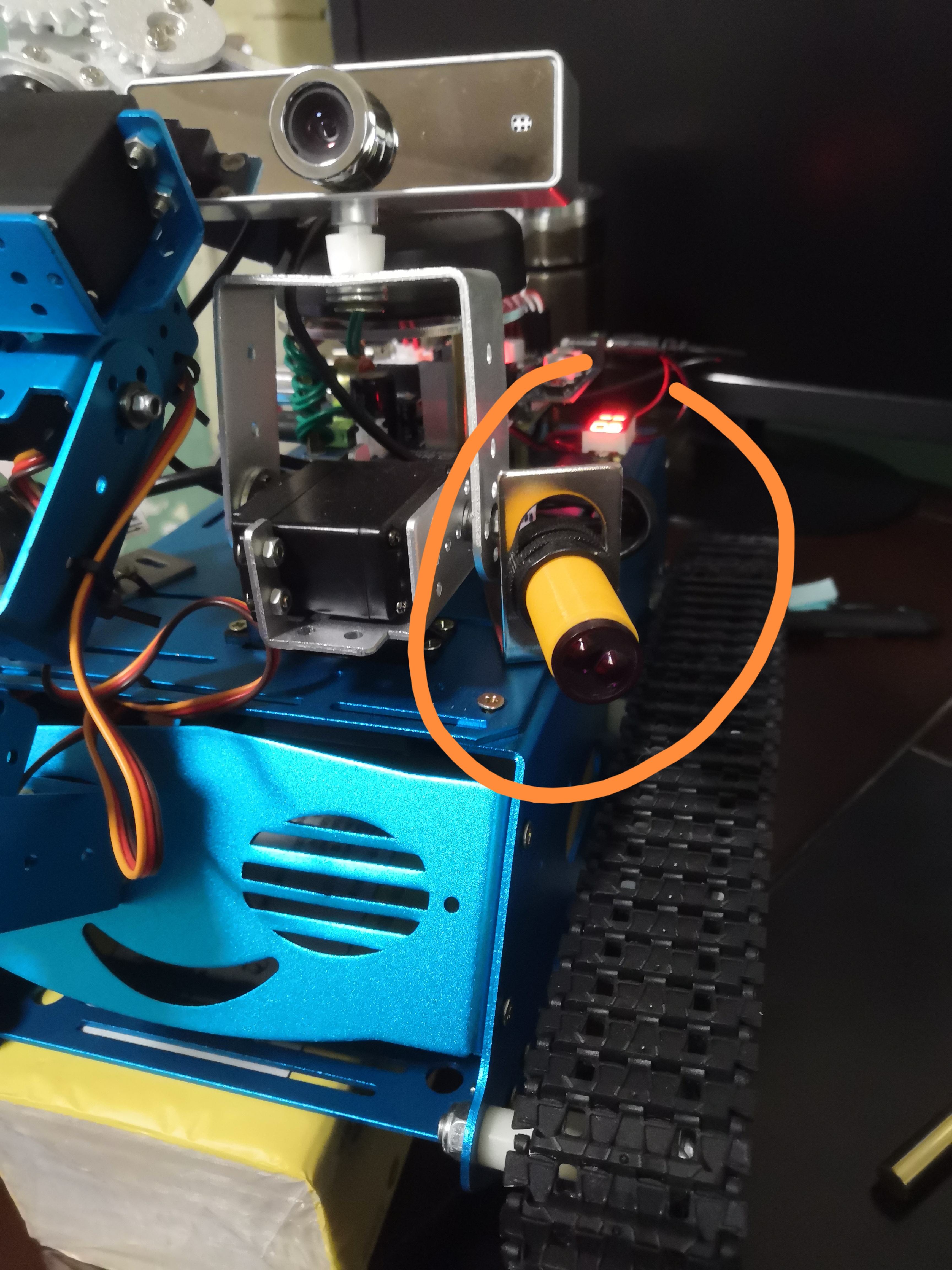 ## 二、组件  ## 三、实验原理  E18-D80NK是一种及发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出,有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测80厘米距离的物体(由于红外光的特性,不同颜色的物体,能探测到的最大距离也不同,白色物体最远,黑色物体最近)。 检测障碍物的距离可以根据要求,通过尾部的电位器旋钮进行调节。  这个NPN型光电开关的输出组是0或1,即数字电路中的高电平与低电平。检测到目标是低电平输出,正常状态是高电平输出。光电开关就三条线:电源、地、输出,输出不需要进行AD转换。 ## 四、实验步骤 **第1步:** 在上面的扩展板TB6612FNG芯片电路图上可以知道连接GPIO的接线情况,A通道为左轮控制,B通道为右轮控制: |PWMA|AIN1|AIN2|PWMB|BIN1|BIN2| |:-:|:-:|:-:|:-:|:-:|:-:| |GPIO18| GPIO22| GPIO27 |GPIO23| GPIO25| GPIO24 | |左侧红外模块输出|右侧红外模块输出| |:-:|:-:| |GPIO12| GPIO16| **第2步:** 编写程序。这里先使用RPi.GPIO库来编写程序,当按下按键后车辆开始行进,左右都没探测到障碍物时直行,左侧探测到障碍物时右转,右侧探测到障碍物时左转,否则就是左右都探测到障碍物停止0.3秒,再后退0.4秒,再左转0.5秒。 ```python #!/usr/bin/python # coding=utf-8 #本段代码实现树莓派智能小车的红外避障效果 #代码使用的树莓派GPIO是用的BCM编码方式。 import RPi.GPIO as GPIO import time import sys SensorRight = 16 SensorLeft = 12 PWMA = 18 AIN1 = 22 AIN2 = 27 PWMB = 23 BIN1 = 25 BIN2 = 24 BtnPin = 19 Gpin = 5 Rpin = 6 #智能小车运动函数 def t_up(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,False)#AIN2 GPIO.output(AIN1,True) #AIN1 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,False)#BIN2 GPIO.output(BIN1,True) #BIN1 time.sleep(t_time) def t_stop(t_time): L_Motor.ChangeDutyCycle(0) GPIO.output(AIN2,False)#AIN2 GPIO.output(AIN1,False) #AIN1 R_Motor.ChangeDutyCycle(0) GPIO.output(BIN2,False)#BIN2 GPIO.output(BIN1,False) #BIN1 time.sleep(t_time) def t_down(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,True)#AIN2 GPIO.output(AIN1,False) #AIN1 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,True)#BIN2 GPIO.output(BIN1,False) #BIN1 time.sleep(t_time) def t_left(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,True)#AIN2 GPIO.output(AIN1,False) #AIN1 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,False)#BIN2 GPIO.output(BIN1,True) #BIN1 time.sleep(t_time) def t_right(speed,t_time): L_Motor.ChangeDutyCycle(speed) GPIO.output(AIN2,False)#AIN2 GPIO.output(AIN1,True) #AIN1 R_Motor.ChangeDutyCycle(speed) GPIO.output(BIN2,True)#BIN2 GPIO.output(BIN1,False) #BIN1 time.sleep(t_time) def keysacn(): # 按下按键后,车辆才行进 val = GPIO.input(BtnPin) while GPIO.input(BtnPin) == False: val = GPIO.input(BtnPin) while GPIO.input(BtnPin) == True: time.sl<ickey>eep(0.01) val = GPIO.input(BtnPin) if val == True: GPIO.output(Rpin,1) while GPIO.input(BtnPin) == False: GPIO.output(Rpin,0) else: GPIO.output(Rpin,0) def setup(): GPIO.setwarnings(False) GPIO.setmode(GPIO.BCM) # 按物理位置给GPIOs编号 GPIO.setup(Gpin, GPIO.OUT) # 设置绿色Led引脚模式输出 GPIO.setup(Rpin, GPIO.OUT) # 设置红色Led引脚模式输出 GPIO.setup(BtnPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # 设置输入BtnPin模式,拉高至高电平(3.3V) GPIO.setup(SensorRight,GPIO.IN) GPIO.setup(SensorLeft,GPIO.IN) GPIO.setup(AIN2,GPIO.OUT) GPIO.setup(AIN1,GPIO.OUT) GPIO.setup(PWMA,GPIO.OUT) GPIO.setup(BIN1,GPIO.OUT) GPIO.setup(BIN2,GPIO.OUT) GPIO.setup(PWMB,GPIO.OUT) if __name__ == '__main__': setup() keysacn() L_Motor= GPIO.PWM(PWMA,100) L_Motor.start(0) R_Motor = GPIO.PWM(PWMB,100) R_Motor.start(0) try: while True: SR_2 = GPIO.input(SensorRight) SL_2 = GPIO.input(SensorLeft) if SL_2 == True and SR_2 == True: # 高电平表示无障碍 print("t_up") t_up(50,0) elif SL_2 == True and SR_2 ==False: print("Left") t_left(50,0) elif SL_2==False and SR_2 ==True: print("Right") t_right(50,0) else: t_stop(0.3) t_down(50,0.4) t_left(50,0.5) except KeyboardInterrupt: # 当按下Ctrl+C时,将执行子程序destroy()。 GPIO.cleanup() ``` **第3步:**使用GPIO Zero库来重新编写程序,引入了Button,Motor,LED,LineSensor几个基本类,使得程序变得简洁易懂,降低了编程难度,特别是等待按键按下的keysacn()函数简化为了两句。 ```python #!/usr/bin/python # coding=utf-8 #本段代码实现树莓派智能小车的红外避障效果 #代码使用的树莓派GPIO是用的BCM编码方式。 from gpiozero import Button,Motor,LED,LineSensor # LineSensor为红外线路传感器 import time SensorRight = 16 SensorLeft = 12 sR = LineSensor(SensorRight) sL = LineSensor(SensorLeft) PWMA = 18 AIN1 = 22 AIN2 = 27 PWMB = 23 BIN1 = 25 BIN2 = 24 L_Motor = Motor(forward=AIN1, backward=AIN2,enable=PWMA,pwm=True) R_Motor = Motor(forward=BIN1, backward=BIN2,enable=PWMB,pwm=True) BtnPin = 19 button = Button(BtnPin,pull_up = False) # 默认情况下True,GPIO引脚将被拉高,这里接线反了,要为False Gpin = 6 Rpin = 5 Gled = LED(Gpin) Rled = LED(Rpin) #智能小车运动函数 def t_up(speed,t_time): L_Motor.forward(speed) R_Motor.forward(speed) time.sleep(t_time) def t_stop(t_time): L_Motor.stop() R_Motor.stop() time.sleep(t_time) def t_down(speed,t_time): L_Motor.backward(speed) R_Motor.backward(speed) time.sleep(t_time) def t_left(speed,t_time): L_Motor.backward(speed) R_Motor.forward(speed) time.sleep(t_time) def t_right(speed,t_time): L_Motor.forward(speed) R_Motor.backward(speed) time.sleep(t_time) def keysacn(): button.wait_for_press() # 等待按钮按下后才继续执行程序 Rled.on() if __name__ == '__main__': keysacn() try: while True: if sL.value == 1 and sR.value == 1: print("t_up") t_up(0.5,0) elif sL.value == 1 and sR.value == 0: print("Left") t_left(0.5,0) elif sL.value == 0 and sR.value == 1: print("Right") t_right(0.5,0) else: print("Back") t_stop(0.3) t_down(0.5,0.4) t_left(0.5,0.5) except KeyboardInterrupt: # 当按下Ctrl+C时,将执行子程序destroy()。 print("Ending Program") ```  
原创作品,未经权利人授权禁止转载。详情见
转载须知
。
举报文章
点赞
(
0
)
张国平
关注
评论
(0)
登录后可评论,请
登录
或
注册
相关文章推荐
MK-米客方德推出工业级存储卡
Beetle ESP32 C3 蓝牙数据收发
Beetle ESP32 C3 wifi联网获取实时天气信息
开箱测评Beetle ESP32-C3 (RISC-V芯片)模块
正点原子数控电源DP100测评
DP100试用评测-----开箱+初体验
Beetle ESP32 C3环境搭建
【花雕体验】16 使用Beetle ESP32 C3控制8X32位WS2812硬屏之二
X
你的打赏是对原创作者最大的认可
请选择打赏IC币的数量,一经提交无法退回 !
100IC币
500IC币
1000IC币
自定义
IC币
确定
X
提交成功 ! 谢谢您的支持
返回
我要举报该内容理由
×
广告及垃圾信息
抄袭或未经授权
其它举报理由
请输入您举报的理由(50字以内)
取消
提交




